
Рефераты по рекламе
Рефераты по физике
Рефераты по философии
Рефераты по финансам
Рефераты по химии
Рефераты по хозяйственному праву
Рефераты по цифровым устройствам
Рефераты по экологическому праву
Рефераты по экономико-математическому моделированию
Рефераты по экономической географии
Рефераты по экономической теории
Рефераты по этике
Рефераты по юриспруденции
Рефераты по языковедению
Рефераты по юридическим наукам
Рефераты по истории
Рефераты по компьютерным наукам
Рефераты по медицинским наукам
Рефераты по финансовым наукам
Рефераты по управленческим наукам
психология педагогика
Промышленность производство
Биология и химия
Языкознание филология
Издательское дело и полиграфия
Рефераты по краеведению и этнографии
Рефераты по религии и мифологии
Рефераты по медицине
Курсовая работа: Промислові роботи
Курсовая работа: Промислові роботи
1.1 Сучасний стан робототехніки
Машинобудування - провідна галузь сучасної техніки і народного господарства України в цілому. Як би не називали наш технічний вік - віком космосу, електроніки та віком атому - основою технічного прогресу були і залишаються машини.
Сучасн машини відіграють важливу роль у створенні матеріально-технічної бази, підвищенні економічного і культурного рівня народу України.
Щоб вийти з економічної кризи необхідно підвищувати ефективність виробництва, тобто треба якнайширше впроваджувати в промисловість машини автоматичної дії (промислов роботи (ПР) та маніпулятори)
В середині ХХ ст. виник і сформувався новий науково-технічний напрям - робототехніка. Предметом робототехніки є дослідження і конструювання роботів та створення на їх основі автоматизованих виробництв.
Розподіл парку ПР по видам виробництв:
25% - ковальсько-пресове і ливарне;
20% - обслуговування матеріало-різальних верстатів;
11% - зварювальні операції;
10% - транспортні і складські операції;
14% - фарбувальні види робіт;
8% - обслуговування термічного обладнання;
12% - нші види робіт.
1.2 Можливості робототехніки
В науково-фантастичній літературі роботів описують у вигляді людей ("Термінатор"). В теперішній час поширюється застосування роботів у сфері обслуговування, а також у виробництві (промисловості).
Промислов роботи на виробництві виконують підйомно-транспортні операції; обслуговують верстати і магазини; зварювальні і малярні операції.
Людству представляється в майбутньому продовжити освоєння надр Землі і шельфових зон морів і океанів, вивчення морських глибин, яке неможливе без широкого застосування підводних роботів, які можуть працювати на кілометрових глибинах.
Підземн роботи можуть виконувати роботи в шахтах. На долю гірників з часом залишаться тільки операції по керуванню та обслуговуванню самих роботів.
Використання роботів в атомній енергетиці , де як відомо небезпечна для здоров`я людини обстановка в радіоактивній зоні. Відомі випадки застосування роботів при гасінні пожеж; на космічних станціях, в металургії та інших сферах.
Можливост роботів значно ширші ніж приклади, що були приведені. Можна зробити висновок про те, що в майбутньому практично не буде таких галузей народного господарства, де не використовувалися би роботи.
Але не треба робити поспішних висновків про те, що роботи вже заповнили весь світ, що всі проблеми вже розв`язані, а людина і не потрібна на виробництві. Ні, сьогодні руки і розум людини потрібні всюди, і перш за все для того, щоб будувати самі роботи, і експлуатувати їх.
Що ж це таке робот ? У загальному розумінні роботи - це такий клас технічних систем, який у своїх діях відтворює подібність рушійних і інтелектуальних функцій людини.
У сферах матеріального виробництва найбільшого поширення одержали промислов роботи (ПР). ПР набули найбільш ефективне застосування в умовах частої зміни об`єктів виробництва, а також для автоматизації ручної малокваліфіковано праці.
Впровадження ПР у виробництво дає можливості розв`язувати такі завдання:
1. Здійснювати автоматизацію виробництв з малосерійним та індивідуальним випуском виробів.
2. Автоматизація основних і допоміжних операцій технічного устаткування.
3. Підвищити культуру і якість виробництва.
4. Підвищити якість продукції.
1.3 Основні поняття визначення
Необхідність автоматизації виробничих процесів у промисловості, які неможливо виконати з допомогою типових машин привело до створення механізмів і машин, які моделюють властивості рухомих кінцівок (рук і ніг) людини і відтворюють їх рушійн функції - це маніпулятори.
Маніпулятор (від лат. manus-рука) - це механізм, який автоматично відтворює функції руки (ноги) людини при виконанн виробничих операцій шляхом переміщення об`єкта в просторі.
Промисловий робот - автоматична машина з програмним керуванням, яка відтворю рушійні і розумові функції людини при виконанні виробничих процесів.
ПР - клас машин для обслуговування технологічних процесів та автоматизац транспортних робіт.
Вони використовуються також в гнучких автоматизованих виробництвах, атомній енергетиці, освоєнні світового океану, космосу та планет.
Відбувається поступове впровадження роботів у всіх галузях виробництва, що пояснюється економічною ефективністю їх використання , підвищенням продуктивності праці , зменшенням строків пуску підприємств, підвищенням якості продукції, забезпеченням великої гнучкості технічних та організаційних завдань виробництва, а також вивільненням робітників із небезпечних і шкідливих виробництв.
ПР використовують на конвейєрних лініях і на складських роботах.
2. Структура класифікація промислових роботів (ПР). Основні технічн показники ПР
2.1 Структура промислових роботів
1. Механічна система (Маніпулятор);
2. Система програмного керування (ЕОМ);
3. Інформаційна система.

По степені досконалості і типам систем керування ПР поділяються на три покоління:
1. Перше покоління - програмні роботи (промислові), які працюють за жорсткими програмами. Вони широко застосовуються в машинобудуванні.
2. Друге покоління - адаптивні роботи, які працюють за гнучкими програмами змінюють характер робіт в залежності від зміни параметрів зовнішнього середовища.
2.2 Класифікація промислових роботів
Конструктивно ПР складається з таких вузлів: основа (рама), привід (двигун), передаточн механізми, виконавчий механізм і захватні пристрої.
Механічна система
![]()
Класифікація промислових роботів
(ГОСТ 25685-83)
![]()
![]()
![]() 2.3 Основні технічн
показники ПР
2.3 Основні технічн
показники ПР
До технічних показників ПР відносяться: номінальна вантажопідйомність, робочий простір, зона обслуговування, число ступеней рухомості, швидкість переміщення, похибка позиціювання робочого органу і похибка траєкторії робочого органу.
Під вантажопідйомністю розуміється найбільше значення маси виробів виробництва, при якій гарантується надійна робота ПР.
Простір, в якому може знаходитися виконавчий (робочий) механізм робота при його функціонуванні називається робочим простором.
Зоною обслуговування (робоча зона) називається частина робочого простору, в якій може виконувати роботу ПР.
Число ступеней рухомості робота залежить від його конструкції ходового пристрою (від 1 до 3).
Форми робочих зон
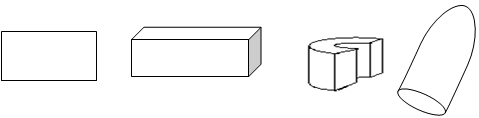 |
плоска просторова циліндрична сферична
рис. 2.1
Похибка позиціювання робочого органа ПР - відхилення реального положення робочого органу від заданого програмою.
 Похибки
Похибки
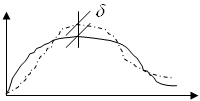 |
рис. 2.2
Відхилення траєкторії робочого органа від заданої програмою називається похибкою траєкторії.
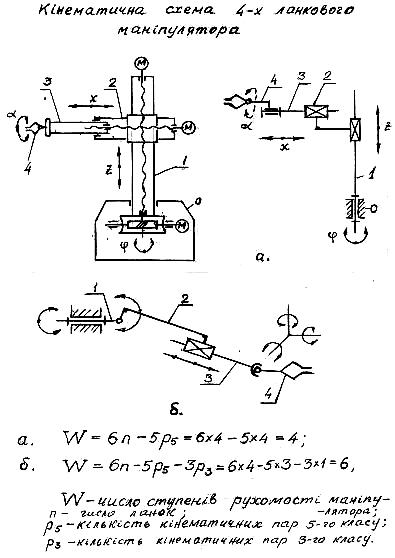
рис. 2.3
3. Типи маніпуляторів
3.1 Структурні і кінематичні схеми маніпуляторів
Механічна система ПР умовно може бути розділена на чотири структурних елементи: 1-основа (нерухома ланка); 2-корпус (портал); 3-механічна рука;
4-захватний пристрій.
Механічна система ПР Кінематична схема маніпулятора
|
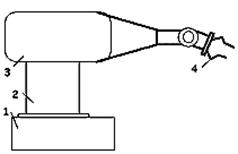
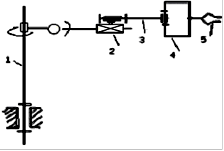
рис.3.1 рис.3.2
Механічна рука і захватний пристрій складають маніпулятор.
Переважне застосування в маніпуляторах одержали кінематичні ланцюги з поступальними обертовими парами ; сферичні шарніри складні у виконанні і утрудняють (заважають) передачу рухів від приводів, тому застосовуються рідко.
Схеми маніпуляторів

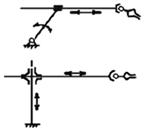
рис.3.3
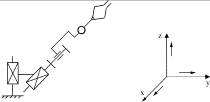
На рис.3.3 показані схеми маніпуляторів для одержання рухів в базовій площині
З допомогою маніпуляторів розв'язують ряд задач в різних областях науки і техніки (робота в небезпечних і шкідливих для людини зонах; трудоємкі і монотонні роботи: зварка, фарбування, зборка та нші).
3.2 Класифікація маніпуляторів
Класифікуються маніпулятори за такими признаками:
1. По характеру виконуючих робіт:
а)універсальні;
б)спеціальні.
2. По способу керування:
а)з ручним (копіруючі);
б)з автоматичним управлінням (по програмі ЕОМ).
Універсальн М. застосовуються для виконання підйомно-транспортних робіт в машинобудуванні, а також для механізації операцій по обслуговуванні технологічного обладнання (установки і знімання деталей на металорізальних верстатах, зварочн свердлильні операції).
Спеціальн М. застосовуються:
- в ковальсько-пресових цехах;
- в ливарному виробництві.
3.3 Технічні показники маніпуляторів
Працездатність маніпуляторів характеризується рядом технічних показників: робочий об'єм, маневреність М., кут і коефіцієнт сервісу, число ступеней свободи, вантажопідйомність, швидкість руху, енергетичні показники .
Незамкнутий кінематичний ланцюг маніпулятора дозволяє захвату займати різні положення в деякому об'ємі, який називається робочим .
Тобто об'єм обмежений поверхнею, яку огинає всі можливі положення захват. Частина робочого об'єму, в якому М. може виконувати операції з об'єктом маніпулювання, називається робочою зоною.
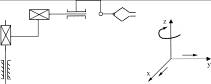
1.Маніпулятор з 2-ма сферичними кінематичними парами і однією обертовою.
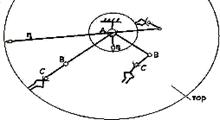
рис. 3.4
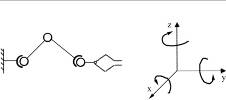
2. Маніпулятор з 2-ма поступальними і 1- обертовою
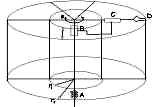
рис. 3.5
Маневреність маніпулятора - це рухомість механізму при нерухомому (фіксованому) положенн захвата. Цей показник характеризує можливість обходу рукою М. перешкод в робочому об'ємі і виконання складних операцій.
Ступінь рухомості маніпулятора визначається по формулі Сомова-Малишева
W=6n-5p![]() -4p
-4p![]() -3p
-3p![]() -2p
-2p![]() -p
-p![]()
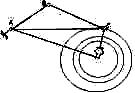
рис. 3.6
Маневреність маніпулятора рівне одиниці, означає можливість спільного обертання ланок 1і 2 навколо вісі АС, яка проходить через центри сфер (рис.3.6)
При роботі маніпулятора захват повинен мати різні можливості переміщення відносно об'єкта, але конструктивні обмеження (форма, розміри) не дозволяють прововодити захват в кожній точці робочого простору під довільними кутами.
Тілесний кут ψ - всередині якого захват може підійти до кожної точки робочо зони , називають просторовим кутом обслуговування , або кутом сервісу .
Відношення кута ψ до його найбільшого значення називають коефіцієнтом сервіса в даній точці : θ=ψ/(4π) , 0≤θ≤1 .
рис. 3.7
Структурні схеми маніпуляторів і їх робочі зони в системі координат
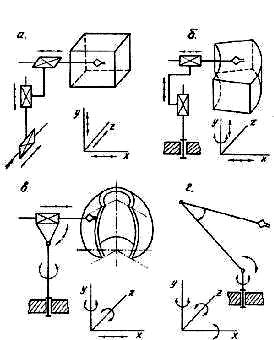
рис. 3.8
3.4 Автооператори
АО - це маніпулятор , який застосовується в машинах-автоматах , які працюють по жорсткій програмі і оперують штучними об'єктами по загальному циклу машини.
Програмоносіями для АО служать кулачки, перфострічки, магнітні стрічки.
Област застосування АО :
1. Автооператор заливщик для машин литва під тиском .
2. Автооператор для змазки прес-форм машин литва під тиском .
3. Автооператор для обслуговування листоштамповочних пресів .
4. Автооператор для установки і знімання деталей при обслуговуванн металорізальних верстатів .
4. Конструкц промислових роботів.
4.1 Конструктивна схема ПР
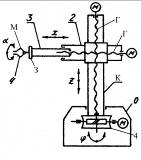
рис. 4.1.
М![]() … М
… М![]() -
електродвигуни ;М
-
електродвигуни ;М![]() - пневмопривід ;
- пневмопривід ;
Механізми :Черв'ячна передача – Ч; Передача гвинт-гайка – Г; Зубчасті механізми – З; Основа механічної системи – О;Корпус – К; Маніпулятор – М; Система керування У.
4.2 Технічні характеристики ПР
1. Модель . 7. Спосіб програмування .
2. Вантажопідйомність . 8. Помилка позиціювання .
3. Число степеней рухомості . 9. Лінійні і кутові переміщення .
4. Число рук (захватних пристроїв). 10. Швидкість переміщення .
5. Привід . 11. Габаритн розміри .
6. Тип системи керування . 12. Маса.
4.3 Системи координат

прямокутна плоска прямокутна просторова
(Декартова) (Декартова)


циліндрична сферична
4.4 Приклади структурних кінематичних схем ПР
1. Прямокутна плоска система координат:
2. Прямокутна просторова (Декартова):
3. Полярна циліндрична :
4. Полярна сферична :
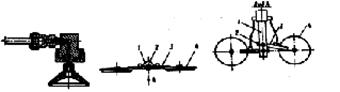
4.5 Типи ПР
Характерн представники конструктивних груп :
1. Напольні ПР.
2. Підвісні ПР тельферного типу .
3. ПР мостового типу .
4. Спеціальні ПР: а) крокуючі; б) підводні; в) космічні.
5. ПР агрегатно-модульного типу .
Проектування нових моделей на базі уніфікованих агрегатних вузлів і блоків (модулів) забезпечує створення широкого діапазону конструкцій ПР з технічними параметрами, які відповідають вимогам конкретного споживача (виробника). Переваги методу А-М побудови: скорочення часу і трудомісткості проектування і можливість виготовлення ПР. При побудові конструкцій ПР застосовуються принципи уніфікац нормалізації як при розробці механічної системи так і системи управління . Класифікуються агрегатно-модульні конструкції ПР по таким признакам: компоновці, по можливості зміни технічних характеристик ПР, по застосуванню систем керування.
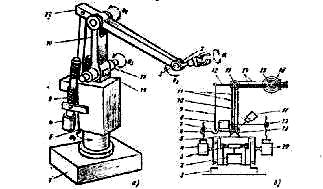
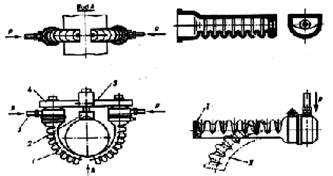
рис. 4.2
Компоновка (а) та кінематична схема (б) промислового робота “Asca 1 Rb-6”:
1-основа; 2,4,17,20-електродвигуни з друкованим якорем та вбудованим редуктором; 3-хвильова передача; 6,18-кулькові гвинтові пари; 5-поворотний корпус; 7-тяга; 8-зрівноважуючий вантаж; 9,10,12-ланки руки; 11-14-тяги; 13,15,19-кривошипи; 16-конічна передача.
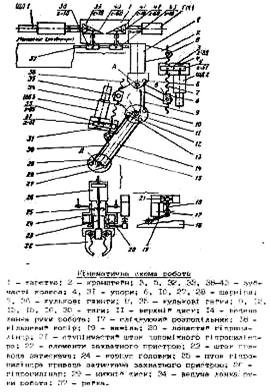
рис.4.3
5. Захватн пристрої
5.1 Класифікація захватних пристроїв
Захватн пристрої (ЗП) маніпуляторів служать для захвату і утримання в певному (конкретному) положенні об'єктів маніпулювання. Ці об'єкти можуть мати різн розміри, форму, масу і характеризуватися різними фізичними властивостями.
Прикладами ЗП являються: монтажні інструменти (тиски, ключі і ін.)
До ЗП ставляться певні вимоги: загального характеру і спеціальні, зв'язані з конкретними умовами праці.
До числа обов'язкових вимог відносяться : надійність захвату і утримання об'єкту, стабільність базування, недопустимість пошкоджень або руйнування об'єктів, міцність деталей ЗП.
Спеціальн вимоги : можливість захвату і базування деталей в широкому діапазоні (маси, розмірів форми), легкість і бистрота заміни елементів ЗП, необхідність автоматично зміни зусиль утримання об'єкта в залежності від його маси.
В теперішній час ведуться розробки конструкцій ЗП, які можуть захвачувати базувати неорієнтовано розміщені об'єкти.
Класифікація ЗП ведеться по ряду признаків:
1. По способу захвату і утримання об'єкта маніпулювання - механічні, пневматичні (вакуумні), електромагнітні і комбіновані.
2. По виду управління (керування) - некеровані, командні, жостко-програмні, адаптивні (чуттєві).
3. По характеру базування: спроможні (здатні) до перебазування - можуть захвачувати і утримувати об'єкти з широким діапазоном геометричних фізичних параметрів; центруючі - пристосовані до захвату і утримання об'єктів за обмежену номенклатуру поверхонь, які відрізняються формою розмірами; базуючі - спеціалізовані, приспособлені до захвату утримання групи об'єктів, які мають однорідні конструктивно-технологічн параметри; фіксуючі - спеціальні - забезпечують захват і утримання одного виду об'єктів маніпулювання.
4. По числу робочих позицій: однопозиційні, багатопозиційні.
5. По характеру кріплення: незмінні, змінні, швидкозмінні, автоматизовані.
6. По робочому діапазону - широкодіапазонні - можуть удержувати об'єкти в широкому діапазоні розмірів поверхонь захвату ; вузькодіапазонн - можуть удержувати об'єкти в обмеженому діапазоні розмірів поверхонь захвату.
5.2 Будова захватних пристроїв і принцип дії. Механічні ЗП некеровані
Виконуються у вигляді пінцетів, розрізних пружніх валиків і втулок (цанг) або тисків з одною або двома рухомими губками, які знаходяться під дією пружин.
пружній валик цанга тиски


|
|
|
||||||
рис.5.1
Розжим робочих елементів таких ЗП проходить при контакті з заготовкою, внаслідок чого можуть бути пошкоджені поверхні деталей або зажимних елементів (недолік). Ці ЗП застосовують в умовах масового виробництва при маніпулюванні з об'єктами невеликих мас і габаритів.
Непривідн ЗП із стопорними механізмами забезпечують чергування циклів зажиму і розжиму деталей, не потребують спеціальних команд від системи керування і додатково енергії. Деталі утримуються силою пружин внаслідок ефекту самозатягування. Як правило, робота таких ЗП можлива тільки при їх вертикальному положенні.
Командн ЗП. Широко розповсюджені конструкції тискового типу (обценьки). Рух губок забезпечується пневмо-, гідро-, або електроприводом.
ЗП з важільними передаточним механізмом і пневмо-гідро приводом.
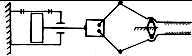
рис.5.2
Центруюч ЗП з рейковим передаточним механізмом.
рис.5.3
ЗП з розширяючими еластичними камерами.
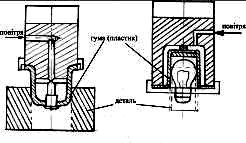
рис.5.4
Застосування таких пристроїв обумовлено кригкістю матерії і складною конфігурацією поверхонь багатьох деталей.
Вакуумні, з згинаючими еластичними камерами і електромагнітні ЗП.
пневмоприсоска елементи кріплення вакуумного з кульовою опороюзахватного пристрою
Захватний пристрій із згинаючими еластичними камерами для захвату виробів за зовнішню поверхню: за внутрішню поверхню:
1-еластичн камери; 2-базуючаІ, ІІ-форми, які приймає камера в призма; 3-патрубки; 4-корпус; залежності від тиску стиснутого 5-різьбовий держакповітря
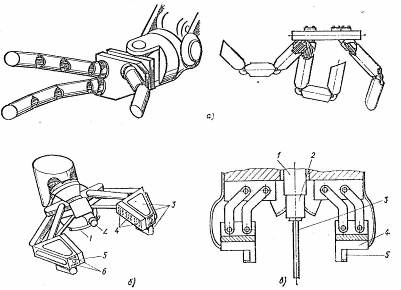
рис.5.7
Адаптивн захватні пристрої:
а-трьохпал з активним тросовим механізмом привода ланок; б-адаптивний; в-з тактильним щупом;
5.3 Розрахунок захватних пристроїв
5.3.1 Задачі розрахунку
Механічн ЗП. Розрахунок включає:
1. Визначення сил, які діють в місцях контакту заготовки і губок елемента ЗП.
2. Визначення сил привода.
3. Перевірка відсутності пошкоджень поверхні деталі при захваті.
4. Розрахунок на міцність деталей ЗП.
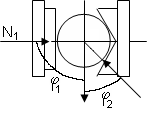
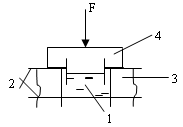
По першому випадку розрізняють такі схеми утримання об'єктів в механічних ЗП :
1. Деталь підтримується губкою елемента ЗП, сили тертя мало впливають на механізм утримання деталі.

рис.. 5.8
N![]() =R
=R![]() [sinφ
[sinφ![]() -μcosφ
-μcosφ![]() ]/[sin(φ
]/[sin(φ![]() + φ
+ φ![]() )-2μcos(φ
)-2μcos(φ![]() +φ
+φ![]() )],
)],
де i, j = 1,2, i ≠ j ;
μ - коефіцієнт тертя губки захвату з деталлю,
негартована сталь μ = 0.12 … 0.15 - Сталь 45, 50;
гартованна сталь μ = 0.3 … 0.35 - сталі 65Г У10А
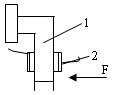
2.
 |
Деталь утримується завдяки запираючій силі губок.
φ![]() = 90˚,
= 90˚,
φ![]() = φ.
= φ.
R![]() N
N![]()
N![]() =R
=R![]() (sinφ-μcosφ)/(cosφ+2
μsinφ),
(sinφ-μcosφ)/(cosφ+2
μsinφ),
N![]() =R
=R![]() /(cosφ+2μsinφ).
/(cosφ+2μsinφ).
3. Деталь утримується силами тертя.
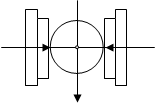
N![]() = N
= N![]() = R
= R![]() /2μ.
/2μ.
На практиці часто зустрічаються складне навантаження ЗП, при якому має місце комбінація описаних випадків.
5.3.2 Розрахунок зусиль привода
Розглянемо на прикладах клинових, важільних і рейкових передаточних механізмів.
Клиновий механізм.
Для симетричних губок : F≥ 2Mtg(β+ρ) / bη,
|
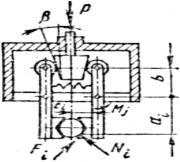 β=
4…8°, ρ= 1°…3° ;
β=
4…8°, ρ= 1°…3° ;
ρ- кут тертя ;
β- кут конуса.
рис.5.11
Загальний випадок:
F≥
![]() M
M![]() tg(β+ρ)
/ bη.
tg(β+ρ)
/ bη.
Важільний механізм.
Для симетричних губок :
|
|
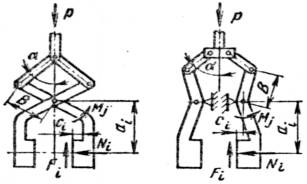
рис.5.12
F≥ 2Mjcosα / bη.
Загальний випадок :
F≥![]() 2Mjcosα /
bη,
2Mjcosα /
bη,
M![]() - момент
захвату.
- момент
захвату.
M![]() =
=![]() N
N![]() cosφ
cosφ![]() [a
[a![]() tgφ
tgφ![]() ±C
±C![]() -
-![]() (a
(a![]() - C
- C![]() tgφ
tgφ![]() )],
)],
φ![]() - кут контакту.
- кут контакту.
Рейковий механізм.
Загальний випадок:
F≥2![]() Mj /(m
Mj /(m![]() z
z![]() η)
η)
|
|
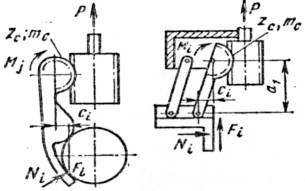
рис. 5.13
де m![]() , z
, z![]() - модуль і число зубців,
- модуль і число зубців,
η- к.к.д. η=0.94.
Вакуумн електромагнітні ЗП.
F![]() =k
=k![]() A
A![]() (p
(p![]() -p
-p![]() ),
),
де k![]() =0.85-коефіцієнт,
який враховує можливість зміни атмосферного тиску і властивість ущільнення ;
=0.85-коефіцієнт,
який враховує можливість зміни атмосферного тиску і властивість ущільнення ;
A![]() - ефективна
площа дії ЗП; p
- ефективна
площа дії ЗП; p![]() - атмосферний тиск; p
- атмосферний тиск; p![]() - залишковий тиск в
камері присосів ; F
- залишковий тиск в
камері присосів ; F![]() - сила ЗП.
- сила ЗП.
Рекомендац
p![]() - p
- p![]() = 0.03…0.035МПа.
= 0.03…0.035МПа.
A![]() =(0.6…0.7)А
=(0.6…0.7)А![]() ,
,
А![]() - площа
поверхні контакту.
- площа
поверхні контакту.
Електромагнітн ЗП.
Сила
притягання електромагніта :![]()
F![]() =(I·n)
=(I·n)![]() /(25A(R
/(25A(R![]() +R
+R![]() )
)![]() ),
),
де
I·n-число ампер-витків обмотки; A-площа поверхні контакту вантажу з полюсами
електромагніта; R![]() , R
, R![]() - магнітний опір на ділянках шляху
магнітного потоку відповідно повітряному і металічному.
- магнітний опір на ділянках шляху
магнітного потоку відповідно повітряному і металічному.
5.3.3 Формули для розрахунку контактних напружень при захваті заготовки (деталі) губками ЗП
Контакти
1.
Лінійний σ=0.418![]()
![]() ,
,

2.
Лінійний σ=0.418![]()
![]() ,
,

3.
Лінійний σ=0.418![]() ,
,

Точковий
σ=0.418m![]() ,
,

l-ширина
губки захвата; N-сила, яка діє в місці контакту захвата з заготовкою; Е![]() - приведений
модуль пружності матеріалів губки захвату і заготовки (деталі); d-діаметр
заготовки (деталі) ; r-радіус губок захвату ; m-коефіцієнт, який залежить від
співвідношення
- приведений
модуль пружності матеріалів губки захвату і заготовки (деталі); d-діаметр
заготовки (деталі) ; r-радіус губок захвату ; m-коефіцієнт, який залежить від
співвідношення
![]() ; E
; E![]() =
=![]() ,
,
![]() 1 0,8 0,60,4 0,2 0,1
0,05
1 0,8 0,60,4 0,2 0,1
0,05
m 0,39 0,42 0,47 0,54 0,72 0,97 1,98
Визначення
напружень на поверхнях контакту ЗП з об'єктами маніпулювання необхідне як при
розрахунку ЗП, так і для встановлення можливості пошкодження об'єкта при його
захваті і утриманні. Контактні напруження σ![]() мають бути менші допустимих
[σ]. (σ
мають бути менші допустимих
[σ]. (σ![]() <[σ
<[σ![]() ]).
]).
6. Приводи і елементи автоматики ПР
6.1 Загальні відомості. Класифікація приводів
Вибір типу привода залежить від функціонального призначення ПР, умов експлуатації, вантажопідйомності, динамічних характеристик і виду системи керування.
До привода пред'являються такі вимоги:
1.Мінімальн габарити. 2. Високі енергетичні показники. 3. Можливість роботи в режим автоматичного керування (тобто забезпечення оптимальних законів розгону гальмування при мінімальному часі перехідних процесів). 4. Швидкодія — здійснення рухів виконавчих механізмів (М) з високими швидкостями і малою похибкою позиціювання. 5. Високий ККД. 6. Забезпечення безпечних умов праці. 7. Можливість встановлення систем охолодження і терморегулювання. 8. Надійність довговічність елементів конструкції. 9. Зручність монтажу, обслуговування, ремонту і переналадки.
Класифікація приводів:
1. В залежності від виду енергії , яка використовується для руху робочого механізму привода: пневматичні, гідравлічні, електромеханічні і комбіновані.
2. По способу відліку координат:
- з відносним відліком координат — по приростам (кроковий двигун);
- з абсолютним відліком координат (електропривод з зворотнім зв'язком) .
6.2 Елементи автоматики ПР
Елементи автоматики забезпечують роботу ПР в автоматичному режимі. Більшість елементів автоматики розміщуються в електричному шкафу ПР. В склад автоматики входять датчики різних типів (шляхові вимикачі, реле і ін.). Вони забезпечують контроль робочих параметрів ПР. Це датчики для обмеження переміщень ланок механічної системи, для фіксації вихідного положення ланок (процес захвату і розжиму об'єктів захватного механізму).
Вибір типів датчиків залежить від умов їх роботи. Захист від коротких замикань перегріву електроапаратів, виконують автоматичні вимикачі, реле і запобіжники .
6.3 Електромеханічний привод
В склад приводу входять підсилювачі потужності, електродвигуни, передаточн механізми, датчики зворотного зв'язку.
Застосовуються електродвигуни загального призначення (асинхронні, постійного струму), а також спеціальні — крокові. Кроковий двигун має дві модифікації: поворотний, лінійний.
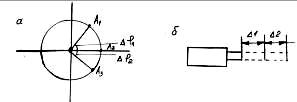
рис. 6.1
Електричн приводи класифікуються:
1. По роду передаточного пристрою: редукторні; безредукторні.
2. По степен управління: регулюючий; програмно-керуючий; слідкуючий; адаптивний.
3. По рівню автоматизації: автоматизований (оператор); автоматичний (без оператора).
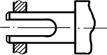
Схема автоматизованого електромеханічного приводу:
![]()
системакроковий редуктор виконавчий керування двигун механізм
6.4 Гідропривід
Широке запровадження гідропривода в робототехніці визвано такими його перевагами:
1. Швидкодія.
2. Можливість безступінчастого регулювання швидкості вихідної ланки в автоматичному режимі.
3. Великий коефіцієнт підсилення по потужності (великі сили може передавати гідропривід).
4. Простота конструкції, висока надійність.
Недоліки:
1. Можливість витоку робочої рідини через ущільнення приводу.
2. Необхідність застосування пристроїв для охолодження (підігріву) робочої рідини.
В гідропривіді застосовуються такі основні типи гідродвигунів:
¾Лінійні гідроциліндри;
¾Поворотні гідродвигуни (гідромотори).
Типи
лінійних гідроциліндрів: ЦРГ ![]()
П діаметр поршня; Ш — діаметр штока; х — хід поршня, мм.
Типи гідродвигунів: ДДТ-16 (М→16, кГм) , ДПГ-63 (М→66,кГм),
ДПГ-125.
Типи гідромоторів : Г15-21Н.
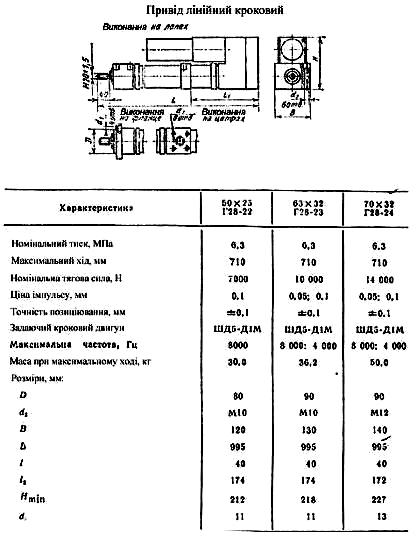
Привід поворотній кроковий: 32Г18-22 .
Привід лінійний кроковий: Г28-22.
6.5 Пневмопривод
Одержав широке застосування в конструкціях ПР вантажопідйомністю до 20 кг. Це зумовлено такими перевагами: 1. Простота і надійність конструкції. 2. Висока швидкість вихідної ланки. 3. Можливість використання енергії стиснутого повітря із заводської системи (повітряної магістралі). 4.Можливість використання в агресивних і пожежонебезпечних середовищах. 5. Високий ККД. 6. Невисока вартість конструкції і малі витрати на обслуговування .
Недоліки :
- Необхідність застосування спеціальних конструкцій позиційних пристроїв.
- Низька питома потужність (висока ступінь стиску повітря).-Шум при роботі.
В склад пневмоприводу входять:
1. Циліндри пневматичні типу ЦРГП.
2. Поворотні пневмодвигуни типу ПДП.
3. Цифрові багатопозиційні лінійні пневмоприводи.
4. Цифрові багатосекційні ротаційні пневмоприводи.
6.6 Комбіновані приводи
Електрогідравлічний привод:
¾Привід позиційного типу;
¾Кроковий привод.
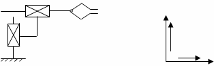
Схема електрогідравлічного привода:
![]()
(система керування)
7 Системи керування ПР та інформаційні системи
7.1 Класифікація СК ПР
Системи керування класифікують за такими признаками:
1. По способу позиціювання:
- позиційні (малоточкові, багатоточкові);
- контурні;
- комбіновані
2. По виду енергоносія:
- механічні;
- гідропневматичні;
- електричні.
3. По способу представлення (подання) інформації:
- електромеханічні;
- числові;
- гібридні
- циклові;
- аналогові;
4. По типу програмоносія:
- з перфострічкою;
- з магнітним барабаном;
- з оптичним диском;
- з магнітною стрічкою;
- з магнітним диском (дискета);
5. По об'єму інформації в управляючій програмі:
- жорстко програмні;
- адаптивні.
6. По способу програмування:
- методом розрахунку (складання програм);
- методом навчання;
- самонавчаємі.
У позиційних СУ задаються початкові і кінцеві положення робочих органів. В малоточкових - число точок позиціювання - до 10. Багатоточкових - до 100.
7.2 Види систем керування
- автономна;
- комплексна;
- багаторівнева.
Найбільше застосування для керування ПР знайшли автономні системи СУ спеціального призначення. Випускаються серійно - уніфіковані системи управління ПР - УЦМ устройство уніфіковане циклове модульне, УПМ - устройство уніфіковане позиційне модульне, УКМ устройство уніфіковане контурне модульне.
1. Малоточечні циклові системи позиційного управління - УЦМ.
2. Числові системи позиційного управління - УПМ.
3. Системи контурного управління серії УКМ.
Система управління (тип 1) призначені для ПР, які обслуговують ковальсько-пресового обладнання, ливарне виробництво, лінії гальванічні та металорізальні верстати в умовах великосерійного виробництва.
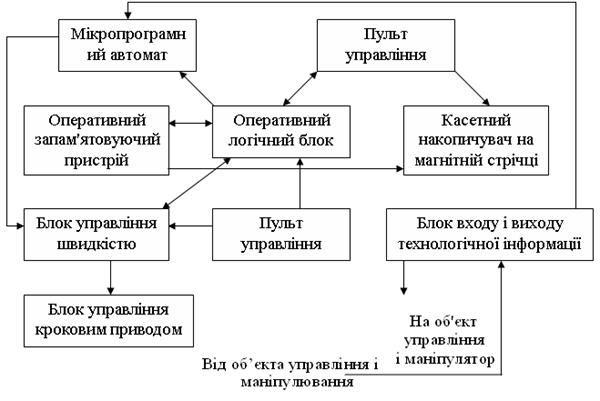
Структурна схема УЦМ.
Система позиційного управління (тип 2) призначені для управління (керування) ПР з значним (великим більше 10) числом точок позиціювання. Застосування - обслуговування підйомно-транспортних операцій, нескладних складальних робіт операцій контактної точкової зварки.
Структурна схема УПМ.
Системи контурного управління (тип 3) призначені для керування ПР, які вимагають складного просторового переміщення виконавчого механізму по заданій траєкторії. Застосування - дугова зварка, складні складальні операції.
Комплексн СУ призначені для управління комплексами обладнання - робот. Використовуються в системах металорізальних верстатів (ЧПУ) - числове програмне управління.
Багаторівнев системи числового управавління роботами застосовуються при обслуговуванн верстатів автоматизованих участків цехів. (Економічно не завжди доцільно).
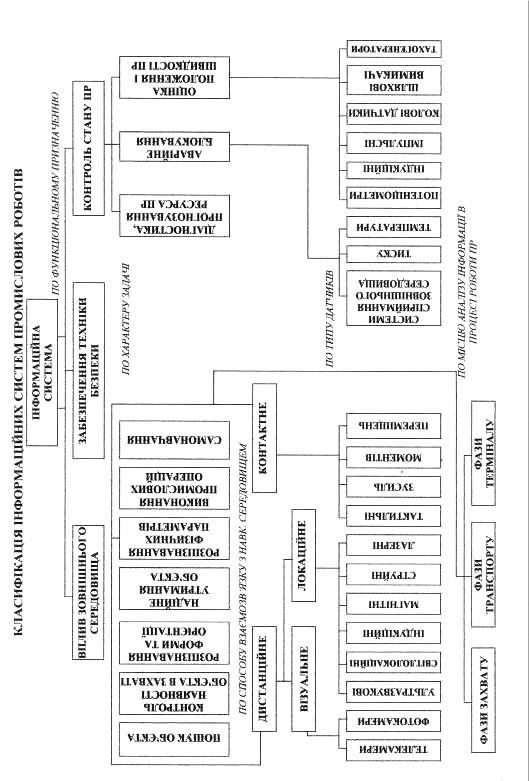
7.3 Класифікація інформаційних систем
Інформаційн системи в значній мірі визначають функціональні можливості ПР, складність задач, експлуатаційну надійність і ефективне використання їх в виробничих умовах, а також вони являються важливими ланками в забезпеченні безпеки обслуговуючого персоналу.
|
1. В залежності від функціонального призначення, інформаційні системи класифікують (розділяють): Система сприймання і контролю інформації про зовнішнє середовище. 1.2 Система забезпечення техніки безпеки. 1.3 Система контролю технічного стану ПР. 2. По характеру завдань, які розв'язуються ПР. Системи: 2.1 Пошуку об'єкта. 2.2 Контролю наявності об'єкта в захваті (ЗП). 2.3 Виявлення форми і орієнтації. 2.4 Надійного тримання об'єкта. 2.5 Визначення фізичних параметрів. 2.6 Виконання виробничих операцій. 2.7 Самонавчання. 2.8 Діагностики ПР. 2.9 Аварійного блокування. 2.10 Оцінки положення і швидкості об'єкта. 3 По способу взаємодії із зовнішнім середовищем: 3.1 Дистанційні. 3.2 Контактні. 3.3 Візуальні. 3.4 Локаційні. |
4. По характеру датчиків. Системи: 4.1 З телекамерами. 4.2 З фотодатчиками 4.3 Ультразвукові. 4.4 Світлолокаційні. 4.5 Індукційні. 4.6 Магнітні. 4.7 Струменеві. 4.8 Лазерні. 4.9 З датчиками сил. 4.10 З датчиками моментів. 4.11 З датчиками переміщень. 4.12 З датчиками тисків. 4.13 З датчиками температури. 4.14 З потенціометрами. 4.15 З імпульсними генераторами. 4.16 З кодовими датчиками. 4.17 З шляховими вимикачами. 4.18 З тахогенераторами. |
7.4 Приклади застосування датчиків в інформаційних системах
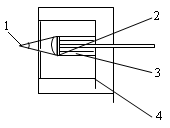
1. Датчик тиску.
1- електропровідник;
2- виводи електрода;
3- пружня оболонка;
4- поршень.
Зміна в тілі тиску приводить до зміни опору струмопровідного полімера.
2. Датчик сил (моментів).
1- тензобалка;
2- електротензометри опорів.
Зовнішня сила F приводить до деформації (згину) балки, яка регіструється електротензометрами опорів.
3. Датчик переміщення.
1- сапфіровий сердечник;
2- п'єзокерамічний датчик;
3- амортизатор;
4- металічний корпус.
Принцип дії - мікронерівності поверхні предмета при його переміщенні викликають появу електричного сигналу на виході п'єзоелектрика.
4. Світлолокаційний датчик.
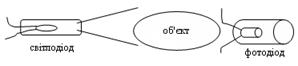
Принцип дії - перекриття світлового потоку об’єктом.
5. Ультразвуковий датчик.
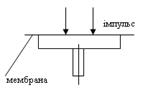
рис.7.5.
Принцип дії – реєстрація ультразвукових імпульсів мембрани.
6. Струменеві датчики.
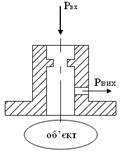
рис.7.6.
Принцип дії - оснований на взаємод потоку повітря з сопла з предметом, або на перериві струї повітря з предметом.
8. Точність позиціонування промислового робота. Основні положення
Точність позиціонування промислового робота – одна з найважливіших його характеристик, яка в значній ступені визначає можливість його використання для автоматизац конкретного виробничого процесу і область використання.
Кількісним показником, який визначає точність позиціонування промислового робота, являється помилка(погрішність) позиціонування, під якою будемо розуміти різницю між фактичним положенням умовної точки робочого органу і точкою, заданою програмою.
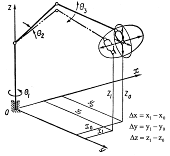
рис 8.1 Точність позиціонування маніпулятора
Помилки
позиціонування маніпулятора будь-якого компонування можуть виражатися лінійними
величинами ![]()
![]() (рис.
8.1). Беззаперечно, що для ричагової і циліндричної компоновки маніпулятора
помилки позиціонування можна представити як кутові (
(рис.
8.1). Беззаперечно, що для ричагової і циліндричної компоновки маніпулятора
помилки позиціонування можна представити як кутові (![]() ) в тому випадку, якщо рука робота
повертається на певний кут
) в тому випадку, якщо рука робота
повертається на певний кут![]() .
.
Крім помилок позиціонування можуть виникати помилки орієнтування робочого органу у просторі.
Розглянемо основні причини помилок позиціонування робочого органу ПР.
8.1.1 Помилки за рахунок приладів керування
Рух робочого органа ПР в загальному випадку визначається роботою приладів керування, відповідно, помилки керування однозначно призведуть до помилок положення робочого органу в просторі. Існуючі стандарти містять недостатню кількість інформації про очікувані первинні неточності, через які виникають помилки керування. Ця задача вимагає серйозного вивчення і узагальнення.
В літературі висловлюються пропозиції, що ці помилкидуже малі і ними можна знехтувати. Цього не слід робити, так як надійність роботиелектроних схемна сьогодні ще недостатньо велика. Можливо розділити помилки приладів керування помилки механічної системи і рахувати їх окремо, але виключати перші не варто.
8.1.2 Помилки за рахунок приводів
Джерелом помилок позицінування промислового робота може виступати привод. Це положення дійсне в тому випадку, якщо прилад керування працює ідеально, без помилок. Помилки приводу виникають в результаті, неточної зупинки частини яка рухається (наприклад, поршня пневматичного або гідравлічного циліндра), неточності роботи електромеханічних кінцевих вимикачів, дискретності покрокових механізмів, і на кінець, неточності зупинки в заданому положенні якоря електродвигуна. Помилки такого типу легше можуть бути виміряні, опрацьовані методами математично статистики і узагальнені. В загальному випадку методика вимірювання помилок привода заключається в наступному: на вхід привода подається строго стабілізований сигнал, а на вихідному елементі вимірюються помилка.
8.1.3 Помилки за рахунок технологічних недопрацьовок при виготовленні елементів вузлів маніпулятора
Залежать від технології виготовлення механічних частин маніпулятора і устаткування. В результаті різного роду неточностей фактичні розміри ланок , які визначають положення робочого органу в просторі, будуть різнитися від деальних(розрахункових). Реальні розміри можуть бути визначені шляхом виміру виготовленої конструкції і враховані в розрахунках. Однак цей шлях доцільний лише в рідких випадках, коли мова йде про унікальні, високоточні роботи. Найчастіше ж визначення очікуваної точності розробляємої конструкц проводиться, опираючись на ту ж інформацію, котра міститься в робочих кресленнях.
Як відомо технологічні погрішності нормуються спеціальними стандартами, як обмежують їх максимальне значення.
Ефект впливу кожної з первинних помилок можно визначати незалежно від впливу інших помилок, а їх сумарна дія на точність позиціонування вимірюється згідно снуючих теорій точності. Що стосується методів сумування і визначення результуючої погрішності, то в теорії точності вони ретельно розглянут головним чином для плоских замкнутих механізмів. Визначення помилки положення робочого органу, як ланки просторового, розімкнутого багатоланкового механізму специфічна задача теорії маніпуляційних систем.
8.1.4 Помилки, обумовлені пружними властивостями кінематичних ланок маніпулятора
Ця група помилок позиціонування робота визначається тим, що в процесі роботи маніпулятор виявляється розімкнутою системою, утворює пружно з’єднану з декількох ланок консоль з великим вильотом і приймає значну піддатливість.
Треба відмітити, що ця група причин в ряді випадків, має велику питому вагу в загальному балансі вихідної помилки позиціонування.
Вивчаючи вплив цих факторів на точність позиціонування ПР, слід розглядати окремо задач статичної і динамічної точності. До першої з них приходять у тих випадках, коли прикладені до маніпулятора зовнішні сили можна рахувати постійними. Друга задача – визначення динамічної точності –значно складніше.
8.1.5 Помилки за рахунок люфтів і зазорів в кінематичних парах
Істотно впливають на точність позиціонування промислового робота. Люфти і зазори вносять додаткову «малу»рухливість в систему.
Якщо по умовах навантаження допустимий статичний підхід і якщо крім того, можна знехтувати тертям в кінематичних парах, рахуючі накладені ними зв’язки деальними, тоді знаючи характеристики зазорів, можна визначити дійсне положення робочого органа. В усіх інших випадках, коли необхідно розглядати динамічну картину і враховувати тертя, задачу динамічної точності можливо розглядати лише при ряді припущень. Головна проблема заключається в тому, що при декількох кінематичних парах рух системи супроводжується її «розривами» і наступними співударами в різних кінематичних парах. В результаті цього руху система не піддається якому-небудь впорядкуванню.
Слід відмітити , що вплив люфтів і зазорів можно в відомих умовах знизити до нуля, якщо система рухається в одному напрямку.
8.1.6 Погрішність позиціонування, яка залежить від умов експлуатації ПР
Можна розділити на декілька типів.
1. Погрішність, викликана нестабільністю умов змазування поверхонь тертя. Є вс причини рахувати, що ці погрішності такого ж типу, як і в інших механізмах машинах, і залежать від конкретного типу змазки, температури навколишнього середовища, ступеня забруднення поверхонь тертя, зміни в’язкості змазки з часом т.д.
2.
Погрішності , викликані зміною лінійного і кругового переміщення робота, в
першому наближенні прямо пропорціональні значенню основного переміщення, але
для точного розрахунку необхідне введення відповідних коефіцієнтів. Це легко
можна проілюструвати на прикладі обертового руху руки робота. Цілком зрозуміло,
що при збільшенні радіуса R повороту руки і при постійній кутовій погрішності ![]() погрішність
погрішність ![]() буде
збільшуватись прямо пропорційно збільшенню радіуса. Помітимо, що для малих
кутів
буде
збільшуватись прямо пропорційно збільшенню радіуса. Помітимо, що для малих
кутів![]() дугу
дугу
![]() можна
рахувати прямою.
можна
рахувати прямою.
3. Погрішності викликані зміною маси вантажу який утримується, істотно впливає на точність позиціонування. Номінальною вантажопідйомністю промислового робота рахується така вантажопідйомність, при котрій забезпечується встановлення значення експлуатаційних характеристик. При зменшенні маси, переносного виробу, особливо якщо вона вище номінальної, погрішність позиціонування різко збільшується, а точність позиціонування відповідно зменшується. Це пояснюється зміною динамічних характеристик системи, перехідних процесів, збільшенням вібрації і т.д. Доцільно відповісти, що залежність між масою транспортованого виробу і погрішністю добре визначається експериментальним шляхом.
8.2.1 Деякі теоретичні положення точності позиціонування ПР
Помилки позиціонування, викликані помилками роботи пристроїв керування, приводів, технологічними погрішностями і упругими властивостями кінематичних ланок, будемо рахувати незалежними випадковими величинами з відомим законом розподілу.
В науці, техніці і масовому виробництві виробів часто доводиться зустрічатися з дослідами, операціями чи явищами, багатократно повторюваних за незмінних умов. При цьому недивлячись на постійність основних умов, які ретельно зберігаються в кожному досліді, їхні результати завжди в ті чи іншій мірі різняться, тобто вони відчувають випадкове розсіяння і підпорядковуються йому.
Класичним прикладом може бути відхилення розмірів валів або отворів деталей, виготовлених машинобудуванням. Ці деталі, які випускаються міліонами примірників, ніколи не можуть бути зроблені абсолютно однаковими. Крім того, виміри одного й того ж об’єкта, виконані з допомогою одного й того ж вимірювального інструмента з однаковою ретельністю не дають однакових результатів. Хоча результат кожного окремого виміру або фактичний розмір деталі, отриманий в процесі обробки, неможливо передбачити завчасно, це ще не означає, що повторні виміри не визначають ніякої закономірності. Ця закономірність добре вивчена і описується кривою , яка називається нормальна крива розподілу.
Особливе місце займають помилки, які виникають в результаті люфтів і зазорів. В першому наближенні їх можна віднести до детермінованих, відомим помилкам, які піддаються прогнозуванню і розрахунку.
Нормальному закону розподілу випадкових величин буде, як правило, відповідати будь-яка випадково змінна величина, яка представляє суму великого числа незалежних випадкових величин. Це положення визначається і підтверджується центральною крайовою теоремою.
На практиці досить часто зустрічаються випадкові процеси, які протікають у вірогіднісному відношенні однорідно при зміні якого-небудь параметра, наприклад часу. Такі випадкові процеси називають стаціонарними.
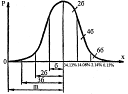
рис 8.2. Нормальний закон розподілу випадкових величин
Нормальний
закон розподілу випадкових величин показаний графіком рис.8.2. Величина m
називається центральним середнім значенням (математичним сподіванням), котре
відповідає невідома «істинна» величина вимірюваного об’єкта, а величина ![]() - середнім
квадратичним відхиленням помилки. Ці величини m і
- середнім
квадратичним відхиленням помилки. Ці величини m і ![]() називаються параметрами
нормальної кривої розподілу, або кривої Гауса.
називаються параметрами
нормальної кривої розподілу, або кривої Гауса.
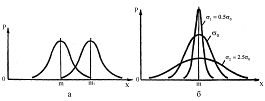
рис
8.3. Зміна кривої розподілу при різних значеннях m i ![]()
Якщо в тих же умовах, тим самим приладом і з тією ж точністю багаторазово вимірювати нший об’єкт зі значенням m1, більшим m, то математичне сподівання результатів повторних вимірювань зміститься вправо в точку з абсцисою m1 (рис.8.3 а), причому форма кривої не зміниться.
Якщо
зміниться характеристика об’єкта або метод вимірювань, то розсіювання
результатів вимірювань буде проходити біля центру з тою самою абсцисою m, але
форма нормальної кривої зміниться, так як середньоквадратичне відхилення ![]() , яке залежить
від характеристик об’єкта або точності вимірювань, буде мати інше значення.
, яке залежить
від характеристик об’єкта або точності вимірювань, буде мати інше значення.
Якщо
новий метод вимірювань буде більш точним, то нове значення параметра ![]() буде меншим.
Іншими словами, середньо квадратичне відхилення характеризує розмах випадкових
коливань вимірюваної величини, який характерний даному методу вимірювань (рис
8.3, б)
буде меншим.
Іншими словами, середньо квадратичне відхилення характеризує розмах випадкових
коливань вимірюваної величини, який характерний даному методу вимірювань (рис
8.3, б)
Нормальна
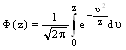
густина ймовірності для будь-якого значення випадкової величини ![]() визначається рівністю
визначається рівністю
![]() (8.1)
(8.1)
де m
![]() -
довільні числа (параметри розподілу), причому
-
довільні числа (параметри розподілу), причому ![]() додатне.
додатне.
Вірогідність
знаходження випадкової величини x, підпорядкованої нормальному закону розподілу
з параметрами m і ![]() , в інтервалі (х1,х2)
, в інтервалі (х1,х2)
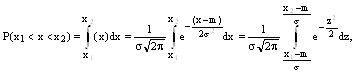
де ![]() допоміжна
лінійна функція, для котрої
допоміжна
лінійна функція, для котрої
![]() (8.2)
(8.2)
де Z
складна подія ![]()
Однак
невизначений інтеграл виду ![]() не виражається через відом
елементарні функції, але в певних межах може бути тим чи іншим прийомом
вирахуваний з яким завгодно ступенем точності.
не виражається через відом
елементарні функції, але в певних межах може бути тим чи іншим прийомом
вирахуваний з яким завгодно ступенем точності.
Визначений нтервал зі змінною верхньою межею виду
 (8.3)
(8.3)
виража
площу під кривою ![]() в проміжку від 0 до z (рис. 8.4),
називається функцією Лапласа.
в проміжку від 0 до z (рис. 8.4),
називається функцією Лапласа.
Відмітимо, що
![]()
площа в проміжку (0;-z) рівна площі в проміжку (0;z), проте рахується від’ємною.
Інтегральну функцію нормального розподілу можна виразити через функцію Лапласа наступним чином:
 (8.4)
(8.4)

Якщо тепер скористатись функцією Лапласа, ця формула прийме вигляд
 (8.5)
(8.5)
Використовуючи
співвідношення (8.5) і відповідну таблицю додатків, можна легко визначити
вірогідність попадання нормально розприділеної величини в інтервали ![]()
Вірогідність
знаходження випадкової величини в інтервалі ![]() близька до одиниці (0,9973). Тому
«трьохсігмові» межі приймають за межі практично гранично можливих значень
нормально розприділеної випадкової величини . Інакше кажучи,
близька до одиниці (0,9973). Тому
«трьохсігмові» межі приймають за межі практично гранично можливих значень
нормально розприділеної випадкової величини . Інакше кажучи,
![]()
Знаючи xmax і xmin можно наближено визначити середньо квадратичне відхилення:
![]()
![]()
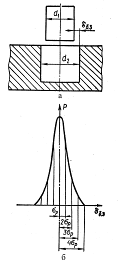
Розглянемо на простому прикладі (рис. 8.5) залежність вірогідність збірки від бокового зазору
![]()
де d1 діаметр вала; d2 – діаметр отвору.
Крива (рис. 8.5б) залежність вірогідності зборки від зазору. Для зменшення зазору використовують спеціальні присадки.
8.2.2 Помилки позиціонування за рахунок неточності виготовлення і зборки
Припущення про те, що точність позиціонування промислового робота визначається тільки помилкою його позиціонування, а виріб виготовлено і установлено абсолютно точно, являється частковим випадком системи «робот – інструмент – деталь» (РІД). В дійсності існують і інші помилки, які суттєво впливають на точність позиціонування.
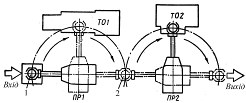
рис 8.6. Рух робота по схемі «взяти-перемістити-покласти»
Для пояснення написаного приведемо наступні приклади. Нехай , промисловий робот повинен взяти заготовку 1, яка знаходиться в пристосуванні, і перенести її в друге положення, наприклад, в прес (рис 8.6). Це класична задача роботизац виробничих процесів, яка іноді називається «взяти – перенести – покласти». Заготовка розміщена в пристосуванні не абсолютно точно. В залежності від конкретної конструкції пристосування помилка установки заготовки може коливатися в великому діапазоні – від 0,01 мм до декількох міліметрів. Якщо заготовка знаходиться на періодично рухаючомуся конвеєрі або столі який обертається, то точність її позиціонування буде визначатися і точністю транспортної одиниці.
Якщо робот підбирає заготовку з того місця, де її поклав її попередній робот 2, а спеціальні міри по підвищенню точності її позиціонування не прийняті, то погрішність установки заготовки можна рахувати рівною погрішністю роботи першого робота.
В виробничій практиці підприємств машинобудівного напрямку часто мають місце помилки виготовлення заготовки. Припустимо, що необхідно сумістити деталь, котру подає робот, з отвором, який передбачений в корпусній деталі. В загальному випадку слід враховувати допуск на відхилення центра отвору, котрий встановлений кресленням і залежить від точності обробки отвору на конкретному верстаті. Вірогідність того, що центр отвору точно співпадає з даним дуже мала.
Найбільш яскравий приклад можна привести з автомобілебудування, де промисловий робот все ширше використовуються для контактної точкової зварки кузовів легкових автомобілів і кабін вантажних автомобілів. З допомогою спеціальної методики досить складного вимірювального приладу встановлено, що одна кабіна може відрізнятися від іншої досить суттєво. Це пояснюється неточністю заготовок, зносом штампів і прес-форм, неточністю складаючих пристроїв.

рис 8.7. Схематичний розріз автомобільної кабіни и можливі помилки збірки
Сказане
прояснюється рис 8.7. Як би точно не була встановлена основа кабіни на
платформі вимірювально пристрою, верхні і нижні частини кожної кабіни мають
відхилення в вертикальній і горизонтальній площині, які іноді досягають ![]() . Відповідно
значне відхилення кромки від вертикалі і горизонталі не забезпечує нормальну
роботу промислового робота, який проводить контактну точкову сварку, і вимага
примінення або спеціальних самовстановлюющихся клещів, або адаптивного робота.
. Відповідно
значне відхилення кромки від вертикалі і горизонталі не забезпечує нормальну
роботу промислового робота, який проводить контактну точкову сварку, і вимага
примінення або спеціальних самовстановлюющихся клещів, або адаптивного робота.
8.2.3 Помилки позиціонування за рахунок люфтів в кінематичній схемі маніпулятора
В достатньо складних механізмах, як правило, присутні люфти, котрі з’являються за рахунок зазорів, якщо не були прийняті спеціальні заходи по їх усуненню. Ц люфти в кінематичних парах сумуються і суттєво погіршують точність роботи механізму. Задача виявлення, вимірювання і усунення люфтів дуже добре вивчена опублікована в багатьох виданнях.
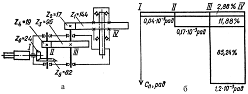
рис 8.8. Кінематична схема приводу промислового робота ИЭС-690 (а) і діаграма люфтів до модернізації (б)
Звернемо увагу на ті специфічні особливості, котрі властиві промисловим роботам. Для цього розглянемо конкретні механізми азимутального повороту маніпулятора промислового робота ІЕС-690 (рис 8.8а). На схемі вказано кількість зубців на шестернях, що дозволяє порахувати передаточне число. Розрахунок, виконаний для конкретних умов виготовлення конічних і циліндричних шестернь, дає наступний сумарний люфт, приведений до кінця невидвинутої руки:
![]()
а відповідний сумарний люфт при повністю висунутій руці
![]()
Перед тим, як приймати рішення про використання тих чи інших заходів по зменшення або усуненню люфтів, доцільно визначити складові сумарного люфта в окремих ланках механізму.
На рис 8.8б представлена діаграма люфта Сп, приведеного до кінця руки робота, яка наглядно ілюструє складові сумарного люфта в трьох шестерінчатих передачах, приведених до вихідного валу редуктора азимутального повороту (вказані в радіанах і процентах). З діаграми слідує, що максимальний люфт спостерігається в останній ланці (85,24%). Точність позиціювання впливає на якість роботи ПР.
9. Мікропроцесорні пристрої в сенсорних системах роботів
На даний час все більш широкого застосування в промисловості та інших областях отримують системи технічного зору. Даний параграф присвячений задачам, методам та алгоритмам обробки відеоінформації. Поряд з цим розглядаються питання реалізац алгоритмів аналізу зображення.
9.1 Задачі відеоаналізу у робототехніці
Задач в робототехніці можна поділити на двомірні (плоскі) і трьохмірні (об’ємні), одно і багатопредметні, статичні і динамічні.
При багатопредметній задачі на відміну від однопредметної в поле зору відеосенсора одночасно знаходиться декілька об’єктів. Мета відеоаналізу полягає в отриманн стислого опису зображення, яке інваріантне в заданому відношенн відповідає на ті чи інші питання відносно зображуваних об’єктів. Ці питання торкаються геометричних та якісних характеристик, взаємного положення об’єктів.
Розглянемо коротко основні групи задач відеоаналізу.
Аналіз довільного одиничного об’єкта в кадрі.
Метою аналізу являється:
- Розпізнання типу об’єкта незалежно від його кутової орієнтації, просторового розміщення і в заданих межах від масштабування;
- Визначення просторових та кутових координат об’єкта;
- Визначення геометричних параметрів об’єкта і контроль якості.
Такими об’єктами можуть бути деталі, частини маніпуляторів, інтегральні схеми і т.д.
Аналіз декількох об’єктів, які одночасно знаходяться в кадрі. Мета аналізу в даній групі така, як і в попередній. Разом з тим для групи, яка розглядається додатково потрібно встановити місце знаходження кожного об’єкта і визначити взаємозв’язок зображуваних об’єктів.
Розглянемо ряд типових прикладів. Так, вимагається взяти з подаючого пристрою чи з автоматизованого складу конкретну деталь. Однак в полі зору відеосенсора знаходиться також частини подаючого пристрою та іншого виробничого обладнання, яке необхідно відрізняти від потрібної деталі. До цієї групи задач відносять монтаж бункера розпізнавання штампованих текстів.
Широку групу складають задачі контролю, так як статично кожна п’ята операція в промисловості – це операція контролю. До них відносяться і візуальний контроль дисплею, який складається з декількох компонентів, у цьому випадку встановлюється положення одних компонентів виробу по відношенню до інших. Великий об’єм контрольних задач складає візуальне визначення якості штампованих плат нтегральних мікросхем. Електричне тестування не дозволяє локалізувати велику кількість дефектів, тому його доповнює візуальний контроль. При виготовленн нтегральних схем візуальний контроль використовується як в процесі нанесення провідників, так і перед кінцевим розміщенням кристала в корпус. При цьому потрібно відрізнити металізовані точки від фонових, виділяти із цілісного зображення схеми контактні площадки, визначати їх координати, ступінь відхилення форми від заданої та ін. Кристал може досліджуватись на забруднення, тріщини, відносно великі області металізації, дефекти форми в цілому і окремих контактних площадок, а також на значне відхилення рівнів кольору.
Аналіз схематичного зображення. Робототехнічні системи являються компонентами ГАВ. Створення ГАВ зв’язане з роботами в області автоматизації проектування. Роль аналізу зображення в даному випадку полягає у вводі креслень, схем, рисунків, виконаних від руки, топографічним способом або світловим пером на дисплеї. В розглянутій групі задач розпізнавання прямих і кривих ліній, умовних позначень електричних елементів та ін. являється необхідним етапом. При ввод креслень, виконаних топографічним способом, механічне переведення зображення в пам’ять без розпізнавання вимагає надмірні вимоги до об’єму пам’яті ЕОМ. Креслення вводяться для наступного аналізу, наприклад для перевірки правильності схеми у відношенні з заданим еталоном. Це вимагає логічного кодування схеми.
Трьохмірний зір. Задачі, розглянуті вище, являються двомірними. Для робототехнічних систем дуже важливі і трьохмірні задачі. Інформація відносно дальност необхідна по ряду причин. Робочий простір по суті трьохмірний, хоча спеціальн засоби і обмеження можуть зменшити потребу в третьому вимірі, така інформація все ж необхідна. Штамповані плати і інтегральні схеми мають важливі вертикальн компоненти. Маніпулювання в робочому просторі в основному трьохмірне, це відноситься і до задачі монтажу, де необхідно користуватися інформацією відносно глибини. Інформація відносно дальності важлива також і в тому відношенні, що це може часто спростити розпізнавання форми, орієнтацію, а також складність і габарити роботів.
Розпізнавання являється одним з етапів рішення трьохмірних задач. Наприклад, в триангуляційній схемі необхідно ідентифікувати одні і ті ж точки предметів в різних ракурсах. При розпізнаванні сцен інформація по дальності дозволя проводити просторову сегментацію і тим самим виділяти окремі предмети в робочому просторі, відновлювати просторову форму об’єктів, для цього необхідна калібраційна процедура відповідності координатної системи відеодатчика з координатною системою робота.
Одним з шляхів підвищення точності маніпуляторів являється збільшення їх механічно складності, що зв’язане із збільшенням маси і габаритів. Більш легкі і дешев маніпулятори при збереженні точності позиціювання можна отримати за допомогою зворотнього відеозв’язку. Такий відеозв’язок дозволяє корегувати рух захватного механізму по траєкторії, оперативно виробляючи команди корекції, що забезпечу задану точність без використання прецизійних механізмів.
9.2 Програмування обчислювальних пристроїв робототехнічних систем
В даному розділі розглядатимуться роботоорієнтовні мови програмування. Поряд з традиційними методами програмування увага приділяється також програмування робототехнічних систем з використанням графічних засобів.
Методи мови в програмуванні роботів.
Методи програмування роботів можна розділити на наступні:
- пряме навчання;
- роботоорієнтоване програмування;
- задачно-орієнтоване програмування.
Пряме навчання – це простий метод програмування роботів, одержав найбільше поширення. Він передбачає ручне переміщення робота у всі потрібні положення і запис відповідних їм координат з’єднання. Крім того, для деяких положень вказується необхідність виконання таких операцій, як змикання захватного пристрою та ін. Виконання програми полягає в переміщенні робота у відповідності з заданою послідовністю положень. Пряме навчання – простий і легкий в реалізації метод програмування ,однак для нього характерні суттєві обмеження. Цей метод не потребує застосування універсальних обчислювальних машин, тому він був широко розповсюджений на протязі ряду років, доки введення обчислювальних засобів в промислові роботи настало економічно оправданим. Обмеження цього методу пов’язані з неможливістю використання давачів. Користувач визнача послідовність дій роботів, яка не може містити умовних переходів, обчислювальних і циклічних операцій. Цей метод в основному ефективний в деяких областях, зв’язаних з точковим зварюванням, фарбуванні і при простих завантажувально – розвантажувальних роботах. В більш складних технологічних процесах, таких, як механічне складання чи контроль якості, послідовність дій робота необхідно визначати в залежності від сигналів давача, а також від нформації, яка отримується з баз даних або яка отримується в результаті тих чи нших вимірів.
В метод робототехнічного. Перевага цього методу заключається в можливост використання сенсорної інформації від давачів сил, тактильних давачів та інших для корекції руху роботів. Завдяки використанню давачів робот може функціонувати в ситуації, коли для даних про зовнішні об’єкти властива деяка ступінь невизначеності, що розширює область застосування робототехніки. До недоліків робототехнічних мов відноситься те, що користувач повинен мати достатньо високу кваліфікацію в області програмування.
Спростити процедуру програмування можна використанням в робототехнічних мовах програмування методів машинної графіки. Цей шлях пов’язаний з заміною методу прямого вивчення моделюванням робочого простору роботів.
В метод задачно-орієнтованого програмування визначається не рух роботів, а бажане розміщення об’єктів. Задачно-орієнтоване програмування дозволяє абстрагуватися від особливостей конкретного робота, і при цьому користувачу не приходиться визначати траєкторії руху і положення, які залежать від геометрії і кінематики робота. Вихідною інформацією для задачно-орієнтованого програмування являється геометрична модель робочого простору і робота.
Задачно-орієнтован системи програмування називаються також системами моделювання робочо обстановки.
На даний момент розроблено велике число систем програмування роботів на основ методів прямого вивчення і роботоорієнтованого програмування. В той же час методи задачно-орєнтованого програмування знаходиться на стад експериментального дослідження. Якщо провести аналогію з мовами програмування ЕОМ, то задачно-орєнтоване програмування відноситься до роботоорієнтованого програмування так само, як і мови високого рівня відносяться до мови асемблера нших мов низького рівня.
Роботоорієнтовані мови програмування. Розглянемо декілька роботоорієнтованих мов.
1. МНІ Ця роботоорієнтована мова програмування, створена для одного з перших роботів, керованих за допомогою ЕОМ, який був розроблений в Массачусетському технологічному інституті(США).Основні прийоми програмування в системі МНІ базується на концепції обережного руху, тобто руху, який здійснюється доти, поки не буде отриманий певний сигнал від давача .За допомогою МНІ неможна виконати арифметичні та інші дії, які виходять за рамки опитування давачів.
2. WAVE Мова створена в Стенфордському університеті(США).Основні допуски закладені в цій мові полягають в тому, що параметри руху можуть бути розраховані наперед і в процесі виконання руху необхідні лиш деякі відхилення від заданої траєкторії.
3. MINI Мова MINI отримана шляхом введення в мову LISP деякого числа додаткових функцій, які забезпечують сумісність з спеціалізованою обчислювальною машиною, на якій виконується програма в реальному масштабі часу. Мова використовується для програмування роботів ,виконавчий орган яких переміщається в декартовій системі координат
4. В мові AL об’єднуються специфічні робототехнічні функції і можливості мов програмування високого рівня, таких як ALGOL і PASCAL .В цій системі програма виконується на двох ЕОМ. На першій – компіляція програми, на другій – отримана програма низького рівня виконується в реальному часі на керуючій ЕОМ.
5. VAL. Ця система програмування представляє собою інтерпритатор, вдосконалені методи розрахунку траєкторії дозволяють виключити етап попередніх розрахунків. Система VAL допускає сумісність з системою технічного зору роботів може визначати систему координат деталей, потрапивших в поле зору телекамери.
6. AML. За допомогою цієї мови можна запрограмувати алгоритм взаємодії з системою технічного зору, також можна виконувати операції над векторами і матрицями повороту, а також програмувати алгоритми планування траєкторії при обмеженнях по швидкості та положенню робота.
7. ТЕАСН. У цій мові вирішуються дві проблеми, яких не торкалися в інших мовах програмування: парелельне виконання декількох задач і написання роботонезалежних програм. Однак навіть засобів такої спеціально розроблено мови, як ТЕАСН не завжди достатньо для розрахунку складних задач групового управління.
Задачно-орієнтоване програмування. Опис завдання на робототехнічних мовах передбачає специфікацію дій, необхідних для їх виконання роботом. При задачно-орієнтованому програмуванні завдання вказується шляхом специфікації дій, які виконуються над об’єктами. За допомогою транслятора задач задачно-орієнтовані специфікац перетворюються в роботоорієнтовані. Для цього необхідна наявність опису об’єктів, над якими проводяться маніпуляції робота, і середовища, включаючи опис його початкового та кінцевого стану. Транслятор задач генеру роботоорієнтовані інструкції, які дозволяють досягти бажаного кінцевого стану з вихідного початкового. Для надійного виконання задач використовуються методи обережного руху, а також методи знаходження помилок. Тому транслятор задач повинен забезпечувати синтез роботоорієнтованої програми, в якій проводиться аналіз сенсорної інформації.
Задачно-орієнтоване програмування являється продовженням робіт в області автоматизованих систем проектування, а також систем штучного інтелекту.
Трансляцію завдання можна розділити на три етапи: Моделювання робочої установки, вказання задачі і синтез програми управління роботом.
Моделювання робочої установки. Модель містить наступну інформацію:
- геометричний опис об’єктів і роботів в робочому просторі, фізичний опис всіх об’єктів зі вказанням моментів інерції і значень мас;
- кінематичний опис всіх зв’язків;
- описання характеристик роботів – з’єднань, меж рухомості, допустимих прискорень, типів інформації, яка отримується від давачів, і т.д.
Завдання представляється для транслятора як послідовність моделей робочої установки, відповідних визначеним етапам виконання завдання.
Синтез програми управління роботом. На основі специфікації завдання здійснюється синтез роботоорієнтованої програми. Вона в основному ділиться на етапи планування захоплення предметів, планування руху і перевірки виконання плану.
Для надійного виконання задачі необхідні алгоритми, які об’єднують метод обережного руху з методом аналізу сенсорної інформації.
10. Гнучк автоматизовані виробництва
10.1 Класифікація, загальні положення
ГАВ - нова форма автоматизації малосерійного і серійного виробництва.
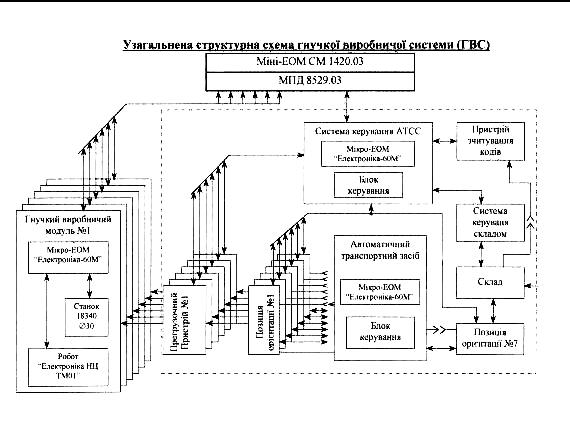
ГАВ - це сукупність у різних поєднаннях обладнання з ЧПУ, РТК, гнучких виробничих модулів, окремих одиниць технологічного обладнання і систем забезпечення їх функціонування в автоматичному режимі протягом заданого інтервалу часу, яка має властивість автоматичної дії при виробництві виробів довільної номенклатури у встановлених границях значень їх характеристик.
По організаційним ознакам ГАВ розділяються на: гнучкі автоматизовані лінії (ГАЛ), гнучкі автоматизовані дільниці ГАД і гнучкі автоматизовані цехи ГАЦ.
ГАЛ - це ГАВ, в якому технологічне обладнання розміщено в прийнятій послідовност технологічних операцій.
ГАД - це ГАВ, функціонуюче по технологічному маршруту, в якому передбачена можливість зміни послідовності використання технологічного обладнання.
ГАЦ - це ГАВ, яке являє собою сукупність ГАЛ, роботизованих технологічних ліній, ГАД.
В склад ГАВ входять:
- гнучкий виробничий модуль - одиниця технологічного обладнання для виробництва виробів довільної номенклатури в деяких межах значень їх характеристик з програмним керуванням, автономно функціонуюча, яка автоматично виконує всі функції при виготовленні продукції.
- роботизований технологічний комплекс (РТК) – сукупність одиниць технологічного обладнання, промислового робота і засобів оснастки, яка автономно функціону виконує багатократні цикли.
- система забезпечення функціонування ГАВ - сукупність автоматизованих систем, які забезпечують проектування виробів, технологічну підготовку їх виробництва, керування виробництвом і автоматичне переміщення предметів виробництва.
В систему забезпечення функціонування ГАВ входять такі складові:
- автоматизована транспортно-складська система (АТСС);
- автоматизована система інструментального забезпечення (АСТЗ);
- автоматизована система прибирання відходів (АСПВ);
- автоматизована система керування технологічними процесами(АСКТП);
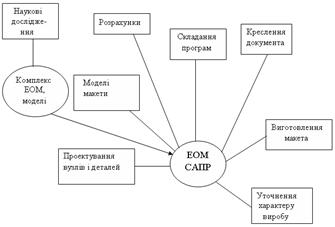
- автоматизована система наукових досліджень (АСНД);
- система автоматичного проектування (САПР);
- автоматизована система технологічної підготовки виробництва(АСТПВ);
- автоматизована система керування (АСУ).
10.2 Структурна схема циклу ГАВ
12. Роботизован технологічні комплекси (РТК)
12.1 Структура і призначення РТК
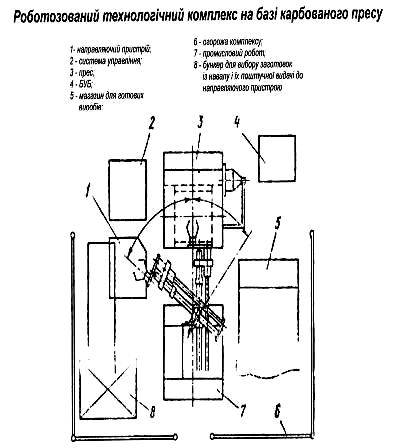
Головна дея роботизації заключається в тому, щоб ПР використовувався спільно з основним технологічним обладнанням, наприклад із пресом, металорізальним верстатом, зварною установкою і ін., якими виконується одна або декілька технологічних операцій. Термін РТК визначено ГОСТом 26228-85.
РТК - це сукупність одиниць технологічного обладнання, промислових роботів і засобів оснастки, яка автономно функціонує і виконує багатократні цикли.
Роботизована технологічна ділянка - це сукупність РТК, зв`язаних між собою транспортними засобами і системою керування.
Існують такі п`ять рівнів автоматизації:
- перший рівень - автоматизація циклу обробки, характеризується тим, що виконується керування послідовністю і характером рухів робочого інструменту з метою одержання даної форми деталі. Такий рівень автоматизації одержав в верстатах з ЧПУ.
- другий рівень - автоматизація вантажних операцій (установка і знімання деталі з верстата), дозволяє обслуговувати декілька одиниць технологічного обладнання, тобто перейти до багатоверстатного обслуговування. Автоматизація транспортних операцій і допоміжних (складання, розрізання матеріалів і ін.)
- третій рівень - автоматизація контролю якості продукції, яка виробляється технологічним обладнанням; стану інструменту, технологічного обладнання. Третій рівень автоматизації забезпечується створенням адаптивних РТК, а також гнучких виробничих модулів (ГВМ).
ГВМ - одиниця технологічного обладнання для виробництва виробів певної номенклатури з програмним керуванням, автономно функціонуюча, автоматично виконує всі функц зв`язані з їх виготовленням, і має можливість входити в ГАС.
- четвертий рівень - автоматизація переналадки обладнання (приспособлень, інструментів і оснастки), зміна циклів і режимів обробки.
- п`ятий рівень - ГАВ гнучкі виробничі системи.
Приведена класифікація автоматизації відноситься до машинобудівного виробництва.
12.2 Технологічне і допоміжне обладнання
У склад РТК входять:
1. Технологічне обладнання (прес, металорізальний верстат, установка для термообробки і ін.);
2. Промисловий робот (маніпулятор);
3. Допоміжне , транспортне обладнання.
РТК бувають: однопозиційні (ТО, ПР, ДО), групові, багатопозиційні.
Технологічне обладнання використовузться різне по конструкції, експлуатації, параметрам ступені автоматизації.
Допоміжне обладнання призначене для
1. Нагромадження певної кількості орієнтованих заготовок виробів на початковій позиції комплексу.
2. Поштучна видача заготовок у визначену точку простору (місце) для захвату її маніпулятором.
3. Транспортування заготовок і виробів між послідовно розміщеним обладнанням усередені комплексу із збереженням орієнтації.
4. Переорієнтація заготовок і виробів.
5. Збереження міжопераційного запасу і запасу між комплексами.
В якості допоміжного обладнання, яке входить в склад транспортної системи в РТК застосовуються лотки (скати, склізи, крокові конвейєри, ланцюгові конвейєри, кругові накопичувальні пристрої, тупикові накопичувачі, роликові конвейєри багатомісна тара).
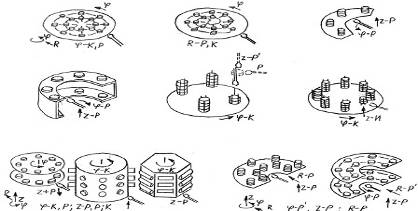
рис.12.2. Обертові накопичувачі
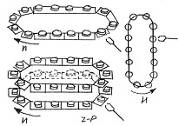
рис. 12.3 Транспортні накопичувачі (конвейєри) РТК
13. Моделювання робототехнічних систем і гнучких автоматизованих виробництв
13.1 Принципи та апарат моделювання гнучких автоматизованих виробництв
Математичне моделювання є одним із основних інструментів рішення задач аналізу, проектування і управління гнучкими автоматизованими виробництвами та робототехнічними комплексами. Зростання ролі моделювання пояснюється, перш за все тим, що інженерні методи вибору технічних рішень та розрахунку технічно-економічних показників, які придатні для традиційних виробництв, виявляються або занадто грубими, або неприйнятними для високоавтоматизованих виробництв, в силу специфіки останніх.
В даному розділ розглянуті принципи та математичний апарат, які найбільш часто використовуються для моделювання технологічної та керуючої підсистем ГАВ.
13.2 Гнучкі автоматизовані виробництва – як об’єкт моделювання
Моделювання ГАВ, як і будь-якої виробничо системи, передбачає визначення складу та характеристик її підсистем, елементів зв’язків між ними. Технологічну систему ГАВ можна розділити на основне технологічне обладнання, транспортну підсистему, підсистему складування. В кожній з цих підсистем, в свою чергу, можна виділити сукупність взаємозв’язаних елементів. Так, основне технологічне обладнання складається з окремих одиниць обладнання, кожна з яких характеризується певними параметрами, наприклад: часом виконання технологічних операцій, надійністю, ємністю магазину інструментів т.д. елементами підсистеми складування є склади, оперативні накопичувач персональні (суміщені з основним обладнанням) накопичувачі. Найбільш важливі їх характеристики – ємність, час обміну виробами, порядок доступу до виробів в накопичувачі.
Вс елементи (як і підсистеми) абстрактно можливо описати трьома категоріями: входи, процес, виходи (рис.13.1).
![]()
рис. 13.1. Елемент технологічного процесу
Входи виходи представляють собою потоки матеріалів, виробів, енергії, інформації. Вони можуть мати як неперервний , так і дискретний характер. Процес – це зміна стану елементів в часі. Стан можна представити вектором параметрів, як характеризують процес. В залежності від типу елемента і ступені деталізац процесу стан може змінюватися дискретно (компоненти вектора стану змінюються в деякі моменти часу миттєво) або неперервно.
Найбільш часто використовують наступні типові елементи моделей виробничих систем:
1.Елемент з одним входом і одним виходом. Такими елементами описуються оброблююче обладнання, накопичувачі, транспортні системи. Стан накопичувача визначається числом виробів, які знаходяться в ньому в даний момент часу; стан транспортної системи – такими характеристиками як завантажена, переміщується, стоїть. Можуть також враховуватися швидкість і прискорення переміщення, час фіксації і розфіксації і т.д.
2.Елемент з двома входами і більше та одним виходом. Такими елементами описуються збірні автомати, в яких відбувається з'єднання деяких виробів в один вузол.
3.Елемент з одним входом і декількома виходами. В деяких випадках таким елементом є автоматизований склад виробів, який має одну завантажуючу декілька вивантажуючих площадок.
Структуру виробничої системи можна представити взаємозв’язаною сукупністю її елементів, при цьому існують різн способи зв’язку елементів. Розглянемо найбільш вживані .
При послідовному з’єднанні вихід попереднього елемента є входом наступного. Видно, що при такому з'єднанні елементів обробляючого типу бажано, щоб ресурси їх продуктивностей були однакові. В іншому випадку виникає “вузьке місце елементи з більшим ресурсом продуктивності будуть працювати з недозавантаженням. Структури з послідовно з’єднаними елементами характерні для збірних технологічних процесів з синхронним конвейєром. Кожний елемент збірним автоматом. Ресурси продуктивності всіх збірних автоматів повинні бути однакові і вибрані так, щоб забезпечити заданий темп випуску виробів.
У випадку, коли продуктивності елементів обробки або збірних елементів змінюються в процесі функціонування, наприклад, із-за простоїв, зв’язаних із збоями або профілактикою, між послідовно з’єднаними елементами доцільно встановити буферний накопичувач із змінним запасом продуктів. При нормальному функціонуванні в накопичувачі піддержується деякий постійний запас продукту. При виході із роботи першого (протягом технологічного процесу) елементу другий не припинить роботу, при цьому запас в накопичувачі буде зменшуватися.
Час роботи другого елемента при непрацюючому першому визначається величиною запасу в накопичувачі. При відмові другого елемента запас продукту в накопичувачі буде збільшуватися, а час роботи першого елемента при непрацюючому другому визначається різницею між максимальною ємністю накопичувача і величиною запасу в момент відмови другого елемента.
При паралельному з'єднанні об’єднані входи і виходи елементів. Таке з'єднання зазвичай використовується для збільшення інтенсивності обробки продуктового потоку, так як продуктивності елементів, з'єднаних паралельно, складаються.
Структура з зворотнім зв’язком, при якій частина вихідного потоку елемента S1 подається на вхід елемента S2 , приведена на рис. 13.2. На практиц структури із зворотними зв’язками використовуються, наприклад, якщо в елемент S1 відбувається контроль виробу, а в елементі S2 виправлення браку.
Реальні виробничі системи, як правило, мають комплексну структуру, тобто структуру, яка об’єднує всі три розглянутих типа з'єднання елементів.
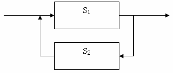
Рис. 13.2. Структура із зворотнім зв’язком.
Побудова структури нових високоавтоматизованих виробництв є, як правило, важко формалізованим процесом. Аналіз запропонованої проектувальником структури технічних рішень в значній мірі базується на математичному моделюванні. При цьому можна рішити наступні задачі:
1. визначити продуктивність всієї системи і завантаження її окремих елементів при відомих характеристиках виробів, технології, ресурсах продуктивності всіх елементів і ємностей накопичувачів;
2. визначити необхідні ресурси продуктивності всіх елементів системи мності накопичувачів при відомих характеристиках виробів, технолог плановому завданні;
3. визначити необхідну продуктивність транспортної системи і ємност накопичувачів при відомих характеристиках виробів, технологій, плановому завданні, ресурсах продуктивності та елементів обробки (зборки) ;
4. визначити втрату продуктивності системи при відмові певних елементів при відомих характеристиках виробів, технології, плановому завданні, ресурсах продуктивності і ємностей накопичувачів.
Перераховані задачі є найбільш характерними при аналізі проектів ГАВ, але не вичерпують список можливих постановок задач.
Для моделювання ГАВ використовуються різноманітні методи, які можна розділити на два широких типи: аналітичні, імітаційні
Аналітичне моделювання основане на поверхневому описі об’єкта, який моделюється з допомогою набору математичних формул. Мова аналітичного опису містить наступн основні групи семантичних елементів:
- критерій; - невідомі; - дані; - математичні операції; - обмеження
Найбільш суттєва характеристика математичних моделей полягає в тому, що модель не є структурно подібна об’єкту моделювання. Під структурною подібністю тут розуміють однозначну відповідність елементів і зв’язків моделі елементам і зв’язкам об’єкта моделювання. До аналітичних відносяться моделі, які побудовані на основі апарату математичного програмування, кореляційного, регресивного аналізу. Аналітична модель завжди являє собою формальну конструкцію, яку можна проаналізувати і рішити математичними засобами. Так, якщо використовується апарат математичного програмування, то модель складається із цільової функц системи обмежень на змінні. Цільова функція, як правило, виражає ту характеристику системи, яку потрібно обчислити чи оптимізувати. Наприклад, це може бути продуктивність системи. Змінні виражають варіативні технічн характеристики системи, обмеження – їх допустимі граничні значення. Процес (у визначеному вище значенні), який відбувається на об’єкті, не має прямого аналогу в аналітичній моделі. Аналітичні моделі є ефективним інструментом для рішення задач оптимізації або обчислення характеристик виробничих систем. Але в ряді практичних задач застосування аналітичних моделей є проблематичним, в зв’язку з їх великою розмірністю. Для збільшення обчислювальної ефективност використовують різні прийоми. Один з них зв’язаний із розбиттям задачі велико розмірності на під задачі меншої розмірності так, щоб автономні рішення під задач в певній послідовності давали рішення основної задачі. При цьому виникають організації взаємодії від задач, які не завжди виявляються простими. Інший приклад розуміє під собою зменшення точності обчислень, за рахунок чого вдається скоротити час рішення задачі.
Імітаційне моделювання основане на прямому описі об’єкта моделювання. Значимою характеристикою таких моделей структурна подібність об’єкта і моделі. Це значить, кожному значимому з точки зору задачі, яка обчислюється, елементу об’єкта ставиться і відповідність елемент моделі. При побудові імітаційної моделі описуються закони функціонування кожного елемента об’єкта і зв’язку між ними. Робота з мітаційною моделлю полягає в проведенні імітаційного експерименту. Процес, який протікає в моделі в ході експерименту, подібний до процесу в реальному об’єкті. Тому дослідження об’єкта на його імітаційній моделі зводиться до вивчення характеристик процесу, який протікає в ході експерименту.
Для формального представлення виробничої системи при імітаційному моделюванн зазвичай використовується схема з дискретними подіями. При цьому процес функціонування системи в часі ототожнюється з послідовністю подій, які виникли в системі у відповідності із закономірностями її функціонування. В формальне поняття “подія” вкладають конкретний смисловий зміст, який визначається цілями моделювання. Важливою властивістю імітації є можливість керувати масштабом часу. Динамічний процес в імітаційній моделі протікає в так званому системному часі. Системний час імітує реальний час. При цьому перерахунок системного часу в моделі можна виконувати двома способами:
1.перший полягає в “русі” по часі з деяким постійним кроком Dt ;
2.другий – в “русі” по часі від події до події .
Рахують, що в періодах часу між подіями в моделі не відбувається ніяких змін.
Крім реального і системного часу існує ще один тип часу – машинний, тобто час, за який реалізується імітаційний експеримент. При імітаційному моделюванні виробничих систем, як правило, намагаються “стиснути” реальний час, тобто протяжність процесів в моделі, яка вимірюється машинним часом, значно менше протяжності тих же процесів в реальному об’єкті. Це дає змогу вивчати функціонування виробничої системи на досить довгих інтервалах часу.
Таким чином основне призначення імітаційного моделювання полягає в наступному:
- виділити найбільш суттєві змінні, оцінити ступінь впливу їх зміни на параметри системи, які досліджуються, а також визначити “вузькі місця”, тобто технологічні, організаційні або керуючі фактори, які найбільш суттєво впливають на показники функціонування системи;
- вивчити дію різних організаційних, керуючих та техніко-економічних змін на показники функціонування системи;
- оцінити різні варіанти технічних рішень і стратегій керування при пошуку оптимальної структури ГАВ.
Ясно, що аналітичні задачі можна рішати з допомогою аналітичних методів, але імітація дозволяє працювати з моделями більшої розмірності, враховувати обмеження і умови, які важко або неможливо включити в аналітичну модель, а також представляти результати моделювання в наглядній, легко інтерпретуємій формі. Однак, це не значить що імітаційне моделювання може замінити аналітичне. Проведення імітаційного експерименту часто виявляється трудоємною і довгою процедурою. Тому, на практиці, при рішенні задач аналізу та синтезу ГАВ аналітичне і імітаційне моделювання об’єднують в комплексну процедуру. Аналітичне моделювання в такій процедур використовують для швидкого, але приблизного оцінювання основних характеристик ГАВ, що дозволяє усунути найбільш суттєві неточності програмування, збалансувати продуктивність окремих елементів, вибрати ємність накопичувачів сформулювати вимоги до системи керування. Імітаційне модулювання займає більше часу і дозволяє визначити вказані характеристики та інші характеристики з більш високим степенем точності.
14. РТК при пакуванні готової продукції в галузях харчової, легкої та інших промисловостях
14.1 Пакетування штучних вантажів
Характеристика штучних вантажів.
Під загальним терміном розуміються матеріали і предмети, які транспортуються складуються. Вид вантажу і його характеристика являються одним із важливих чинників (факторів), які визначають технологію вантажопереробки.
По способу переміщення і технології переробки і засобів механізації розрізняють три основних види вантажів: штучні, насипні і наливні.
Штучні вантаж характеризуються масою, габаритами, видом тари і розділяються на: штучно-масов тарно-штучні.
Штучно-масові вантаж характеризуються однакового порядку розмірами, формою і масою (наприклад цегла).
Тарно-штучні вантажі мають різні розміри і форму - перевозяться в спеціальній упаковці - тарі (ящики, коробки, мішки, тюки, обмотки і ін.).
Транспортна тара повинна задовольняти таким вимогам:
1. Забезпечувати зберігання вантажів.
2. Мати високу міцність.
3. Розміри і міцність тари повинні забезпечувати механізовану (автоматизовану) переробку при транспортуванні і складуванні.
4. Габарити і конструкція тари має забезпечувати укладку вантажів в пакети.
По особливостям експлуатації транспортну тару розділяють на: багатообробну, нвентарну (власність одного підприємства, організації), разову і повторну.
По виду матеріалу з якого виготовляється транспортна тара розрізняють: жорстку (ящики, бочки,барабани), напівжорстку (коробки-ящики із гофрованого котону), мягку (мішки із льняних, х/б, полімерних матеріалів).
14.2 Засоби пакетування: піддони, стрічки, дроти
При транспортуванні вантажі складають в групи (пакети), які повинні бути стійкими міцними (так як під час переміщення виникають сили інерції при розгонах, різких гальмуваннях, поворотах транспортних засобів - автомашин, поїздів і ін.).Сили нерції (як показує практика) досягають таких величин, при яких пакети можуть руйнуватися.
Стійкість міцність пакетів вантажів забезпечується засобами пакетування - основним найбільш поширеним являється піддон.
Конструкц піддонів: плоскі, комірчасті (комора), стоякові.
Інш засоби пакетування - стрічки, дроти.
1. Плоскі піддони .
(дерев`яні)
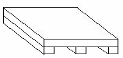
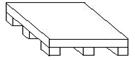
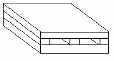
а) однонастільнийб) одно настільний в) двохнастільний
двохзаходнийчотирьохзаходний двохзаходний
рис.14.1.
2. Комірчастий.
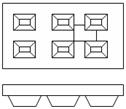
рис.14.2.
Плоскі піддони
1. з гофрованого картону
2. пласмасові
3. металічні
4. стоякові

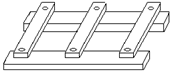
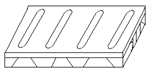
рис. 14.3.
14.3 Структура і способи формування транспортних пакетів
Розрізняють такі основні види пакетів:
1. Пакети сформовані із вантажів без піддонів;
2. Пакети із штучних вантажів;
3. Пакети на плоских піддонах;
4. Пакети на інших конструкціях піддонів;
5. Пакети на стоякових і інших спец. піддонах.
Способи формування пакетів пакетоформовочними машинами
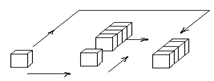
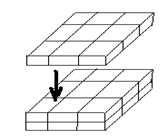
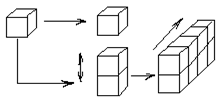
а)горизонтальний спосіб формування ряду б) вертикальний спосіб укладки в) вертикальний спосіб укладки рядів
пакет ряду складеного горизонтально
2.Горизонтальний спосіб укладки в пакет ряду, складеного горизонтально
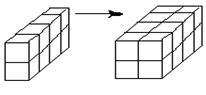
14.4 Класифікація пакетоформуючих машин (ПФМ)
| По типу переміщення | стаціонарні | рухомі |
| По способу керування | автоматичні | напівавтомат |
| По розміщенню подаючого механізму | з верхнім | з нижнім |
| По типу пакетного вантажу | тарно-штучні | штучні |
| По виду привода |
електромеханічні гідравлічні |
пневматичні комбіновані |
| По формуванню пакета | вертикальн комбіновані | горизонтальн комбіновані |
| По способу формування пакетів | поштучн з обв’язкою пакета | рядами без обв’язки пакета |
Принципов схеми пакетоформуючих машин
1.Механізм орієнтації 5.Каретки
2.Конвеєр-постачальний 6.Штовхач
3.Прийомний стіл 7.Візок
4.Подаючий конвеєр
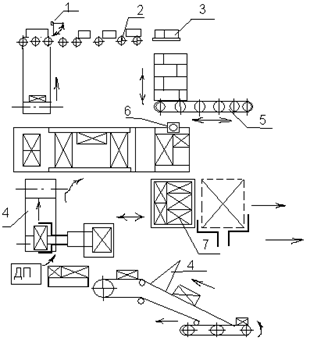
рис.14.4.
15. Роботизовано технологічні лінії (РТЛ)
15.1 Загальні відомості
ПР широко застосовуються в автоматичних лініях. Перш за все це відноситься до контактно точкової зварки кузовів автомобілів (легкових і вантажних), а також процесів гальванопокриття, фарбування і зварки.
Створення застосування роботизованих технологічних ліній - важливе направлення робототехніки, яке відкриває широкі перспективи в виробничому і економічному відношеннях.
15.2 Схеми РТЛ
Автоматичн роботизовані лінії можна розділити на три групи:
1.Роботизовану лінію, яка складається із пульсуючого конвеєра і послідовно розміщених біля нього роботів, кожний із яких виконує свою технологічну операцію.
Особливість цієї схеми заключається в тому, що вироби з конвеєра не знімаються.
РОБОТИ
|
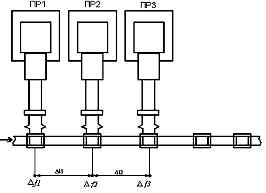
рис.15.1
2. Роботизована лінія складається із пульсуючого конвеєра, послідовно розміщених роботів і технологічного обладнання. При такій компоновці вироби з конвеєра знімаються роботом і переносяться на технологічне обладнання. Така компоновка вимагає дуже чітких і узгоджених дій конвейєра, роботів технологічного обладнання.
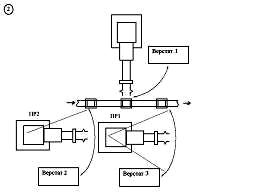
рис.15.2.
3.Роботизована лінія, яка не має конвеєра, складається із послідовно розміщеного технологічного обладнання і промислових роботів.
Така схема близька до схеми роботизованого технологічного комплексу.
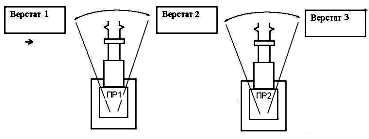
рис. 15.3.
4. Роботизована лінія, яка складається з конвеєра, промислових роботів, технологічного обладнання і позиціонерів.
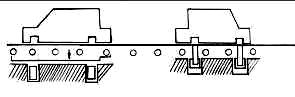
рис. 15.4
5. Роботизована лінія з напольними і підвісними роботами.
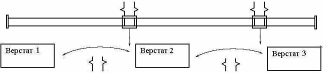
рис.15.5.
РТЛ застосовують в хімікотехнологічному виробництві. Тип схеми вибирають в залежності від технологій виготовлення.
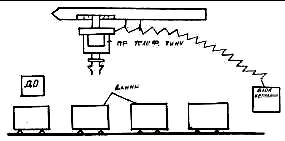
рис.15.6.
16. Економічна ефективність застосування РТК
16.1 Основні завдання
Впровадження ПР в промисловості вимагає виконання певних технічних і організаційних міроприємств; до них відносяться:
1. попередня технологічна підготовка (аналіз виробів, технологічних процесів і обладнання);
2. модернізація основного технологічного обладнання з метою підготовки його до застосування ПР;
3. створення спеціального або спеціалізованого обладнання для орієнтації і транспортування виробів;
4. створення спеціальної або спеціалізованої оснастки та нструментів;
5. перепланіровка виробничих цехів (ділянок).
При розрахунку економічної ефективності ставляться такі завдання:
1. Підвищення продуктивності обладнання, тобто об’єму вироблено продукції з основного технологічного обладнання, яке обслуговується ПР;
2. Підвищення продуктивності праці в результаті заміни ручної прац на допоміжних, транспортних, збірних операціях;
3. Підвищення ритмічності виробництва;
4. Підвищення коефіцієнта змінності обладнання без збільшення чисельності робітників;
5. Зменшення витрат, зв’язаних з суб’єктивними особливостями людини;
6. Зниження процента браку і підвищення якості продукції(виробів)
Застосування ПР дозволяє розв’язати народному господарстві ряд спеціальних завдань:
1. Змінити характер праці і створити кращі умови праці.
2. Зменшити травматизм (приклад-преса) і знищити можливість виникнення професійних захворювань.
3. Облегшити загальну демографічну проблему недостатку робочої сили народному господарстві.
4. Зменшити затрати на житлове будівництво.
16.2 Етапи розрахунків
При створенні РТК розрахунок економічної ефективності проводять на таких етапах:
1. Розробка техніко-економічного обґрунтування створення РТК
2. Розробка технічного завданні (ТЗ).
3. Розробка технічного проекту (ТП)
4. Розробка робочої документації (ТД)
5. Прийомна дослідного зразка
16.3 Методика розрахунку економічної ефективності
При розрахунку економічної ефективності приймається базовий варіант який порівнюється з рядом інших варіантів (при застосуванні того чи іншого ТО і ПР) вибирається оптимальний (ЕОМ – розрахунок).
Економічну ефективність в провадження РТК розраховують для таких етапів:
1-й етап. Визначення доцільності впровадження
2-й етап. Визначення фактичного економічного ефекту від впровадження.
На всіх етапах впровадження РТК річний економічний єфект визначають по формулі
Е=(З1-З2)=(С1+ЕН•К1)-(С2+ЕН•К2).
де Е економічний ефект від використання РТК за один рік експлуатації
З1 витрати виробника по базовому варіанту
З2 витрати виробника при запровадженні РТК
С1 вартість річного випуску продукції по базовому варіанту
С2 вартість річного випуску продукції, які виробленні на РТК
К1 – капітальні вклади виробника по базовому варіанту
К2 – капітальні вклади виробника при використанні РТК
ЕН – нормативний коефіцієнт ефективності (0,15).
Ефективність впровадження РТК буде мати місце при З1>З2 і при терміну окупаємості рівному 6...7 років.
Термін (строк) визначають по формулі (додаткових капітальних вкладень).
![]() < 6 років.
< 6 років.
В практиці при розрахунку економічної ефективності користуються спеціальними Інструкціями по оцінці економічної ефективності створення і використання автоматичних машин” і економічна література напрямку серії „Міжотрасльова економіка”.
17. Перспективи розвитку робототехніки, ГАВ і РТК
В майбутньому очевидні принципіальні можливості робототехніки в завершені комплексно автоматизіції виробництва. Необхідно вважати перспективним створеннянових типів ПР агрегатного типу (модульний принцип побудови ПР), адаптивних роботів більш досконалих ніж ті які випускаються тепер, роботів з штучним інтелектом (ІІІ покоління).
Автори технічної літературипо питанням майбутніх роботів вважають, що в найближчі роки будуть одержані добрі результати по: розпізнаванню образів, розпізнаванню природньої мови людини, проектно-конструкторські роботи і інші види діяльност робота. Будуть розширенні області застосування ПР: космос і море, гірнича справа (добуток корисних копалин, підземні води на інших планетах сонячно системи), с/г виробництво, охорона приміщень, обладнання, машини і інше.
Майбутн роботів. Можна визначити проблеми, які будуть вирішувати в майбутньому роботи: створення штучного інтелекта високого рівня; створення рухомих роботів; створення самонавчаючих роботів. Одним із важливих факторів, які будуть вирішувати розвиток робототехніки в майбутньому – це мініатюризація(зменшення масштабів ЕОМ) засобів обчислювальної техніки, збільшення швидкод підвищення надійності їх роботи.
Немал проблеми визиває задача створення компактних і потужних приводів, які були б швидкодійні, високоточні і малогабаритні.
Великий вплив на проблему створення роботів нових поколінь може біоніка, так як вивчення принципів побудови і функціювання біологічних систем з метою створення нових конструкцій ПР роботів дуже важлива.
Очевидно, що в майбутньому роботи коріним чином змінять характер трудової діяльност людини, повисять культуру праці, тобто зроблять наше життя кращим!

Математичн обчислення
Проектно-конструкторськ роботи
Переміщення в просторі
Дія на зовнішнє середовище

![]()
Розподіл функцій мозку людини з штучним роботом.
© 2009 База Рефератов