
Рефераты по рекламе
Рефераты по физике
Рефераты по философии
Рефераты по финансам
Рефераты по химии
Рефераты по хозяйственному праву
Рефераты по цифровым устройствам
Рефераты по экологическому праву
Рефераты по экономико-математическому моделированию
Рефераты по экономической географии
Рефераты по экономической теории
Рефераты по этике
Рефераты по юриспруденции
Рефераты по языковедению
Рефераты по юридическим наукам
Рефераты по истории
Рефераты по компьютерным наукам
Рефераты по медицинским наукам
Рефераты по финансовым наукам
Рефераты по управленческим наукам
психология педагогика
Промышленность производство
Биология и химия
Языкознание филология
Издательское дело и полиграфия
Рефераты по краеведению и этнографии
Рефераты по религии и мифологии
Рефераты по медицине
Курсовая работа: Расчёт механики функционирования рычажного механизма
Курсовая работа: Расчёт механики функционирования рычажного механизма
Министерство образования и науки Украины
Харьковский национальный университет радиоэлектроники
Кафедра ИКГ
Курсовая работа
Пояснительная записка
Тема работы: Расчёт механики функционирования рычажного механизма“
Харьков 2010
ВВЕДЕНИЕ
Развитие машиностроения на современном этапе характеризуется широким внедрением передовых технологий, техническим перевооружением и реконструкцией действующего производства на основе комплексной механизации и автоматизации с применением автоматических манипуляторов (промышленных роботов), встроенных систем автоматического управления с использованием микропроцессоров и ЭВМ.
Последовательное развитие научно-технической революции неразрывно связано с непрерывным совершенствованием машиностроения – основы технического перевооружения всех отраслей народного хозяйства. Инженерная техническая деятельность на основе научной мысли расширяет и обновляет номенклатуру конструкционных материалов, внедряет эффективные методы повышения их прочностных свойств.
При внедрении в промышленность новых машин широко применяется модульный принцип оборудования, т.е. например, станок или несколько станков и манипулятор. На базе этого принципа создаются и вступают в строй не отдельные машины, а их системы автоматические линии, цехи, заводы, обеспечивающие законченный технологический процесс производства конкретного изделия. Все это, вместе взятое, позволяет при снижении затрат материалов на изготовление и общей стоимости повысить мощность, качество, производительность и экономичность потребления энергии.
Для изготовления деталей машин, приборов, элементов конструкций, оборудования требуются металлические материалы с различными свойствами: твердые, мягкие, способные работать при повышенных или пониженных температурах, обладающие сопротивлением окислению в агрессивных средах, магнитные, немагнитные и другие. Поэтому современный инженер при проектировании какого-либо механизма или устройства должен учитывать как особенности построения механизма, так и свойства материалов из которых он будет изготовлен.
Расчеты деталей машин базируются на знании основ сопротивления материалов – науки о прочности и жесткости механических конструкций и методах расчета. Безошибочность же всех действий в современной технической практике определяется знанием основных положений теоретической механики, в которой изучаются законы движения механических систем и общие свойства этих движений.
СОДЕРЖАНИЕ
Вступление
1. Динамический анализ механизма
1.1 Структурный анализ механизма
1.2 Кинематический анализ механизма
1.3 Кинетостатический анализ механизма
2. Проектный расчет механизма на прочность
2.1 Нахождение реакций в опорах
2.2 Построение эпюр
2.3 Подбор сечений
Выводы
ИСХОДНЫЕ ДАННЫЕ
Таблица 1.1.1 Исходные данные
| № | Параметры | Значение |
| 1 | Частота вращения n, об/мин | 360 |
| 2 |
LAB, мм |
26 |
| 3 |
LBC, мм |
80 |
| 4 |
LED, мм |
95 |
| 5 |
LBE, мм |
40 |
| 6 |
Цениры тяжести S1, S2, S3, S4 S5 размещены посередине соответствующих звеньев. |
|
| 7 | Масса ползуна D кг | 1.5 |
| 8 | Масса ползуна С кг | 2.5 |
| 9 | Момент инерции звена |
J=ml2/12 |
| 10 | Наибольшая сила опоры P, H | 20 |
| 11 | Масса звеьев m=ql, q=0.1 кг/м | Для всех вариантов |
1 Динамический анализ механизма
1.1 Структурный анализ механизма
Большинство современных механизмов в различной аппаратуре широко используют схемы кривошипно-шатунных механизмов или шарнирных трехзвенников. Правильно изготовленные схемы кривошипно-шатунных механизмов в значительной мере усовершенствуют механизм в котором они применяются. Схемы кривошипно-шатунных механизмов применяют в машиностроении в очень больших количествах. Любое усовершенствование механизма должно основываться на том, что это усовершенствование принесет большой экономический эффект, понизит стоимость производства, сократит затраты человеческих ресурсов.
Самыми важными свойствами какого-либо механизма являются: прочность, надежность и долговечность. Несоблюдение этих свойств, может привести к выходу из строя всего механизма или его отдельных элементов и в результате, привести к нарушению нормальной работы устройства в котором оно задействовано.
Ведущее звено механизма вращается против часовой стрелки с заданной частотой вращения.
Звенья механизма соединены кинематическими парами:
1-2 – кинематическая пара 5 класса, вращающаяся;
2-3 - кинематическая пара 5 класса, вращающаяся;
2-4 - кинематическая пара 5 класса, поступательная;
3-5 - кинематическая пара 5 класса, поступательная.
1.2 Кинематический анализ механизма
Определение координат точек звеньев механизма при его двенадцати положениях
Схема механизма в двенадцати положениях приведена в листе 1 графической части. Исходя из схемы механизма находим координаты всех точек звеньев механизма. Выразим координаты всех точек механизма в функции угла φ.
Координаты точки В будут определяться по следующим формулам:
XВ = AВ cos φ; YВ = АВ sin φ.
Координаты точки С будут определяться по следующим формулам:
XС=![]() + XВ YС=0
+ XВ YС=0
Координаты точки E будут определяться по следующим формулам:
XE= XВ +(![]() )/2 YE= (ВС/2)
sin
)/2 YE= (ВС/2)
sin![]()
sin![]() =(АВ/ВС) sin φ
=(АВ/ВС) sin φ
Координаты точки D будут определяться по следующим формулам:
XD=0 YD=![]() + YE
+ YE
По этим формулам определяем координаты каждой точки механизма для двенадцати положений (при изменении угла φ от 0 до 3600) и заносим полученные данные в таблицу 1, где сравниваем их с координатами точек полученных графическим способом (координаты определенные графическим способом уже занесены в таблицу 1).
Определение траекторий точек звеньев механизма
При рассмотрении движения механизма при изменении угла φ от 0 до 3600, можно сделать вывод, что траекториями движения точки B является окружность радиусом равным AB. Точка E движется по элепсоидной траектории. Точки С и D совершают колебательное движение.
Построение планов скоростей
Построение планов скоростей начинаем с определения скорости точки В. Кривошип АВ вращается вокруг неподвижной оси, поэтому линейная скорость любой точки численно равна произведению угловой скорости звена на расстояние от этой точки до оси вращения:
VB = АВ* ω = АВ*n*π/30=360*3.14*26*10-3/30= 979.68*10-3 м/c
Направлена линейная скорость точки В по касательной к траектории или перпендикулярно АВ в сторону вращения. Выбрав отрезок (в мм) PVA, изображающий скорость точки В, посчитаем масштабный коэффициент плана скоростей
μV = VВ/PVВ = 979.68*10-3/196 = 5*10-3 м/с/мм
Величину PVA выбираем произвольно, но так, чтобы μV получилось числом, удобным для счета.
Определим скорость точки С. Звено ВС совершает поступательное плоское движение. Скорость любой точки плоско движущегося звена равна геометрической сумме скорости полюса и скорости движения вокруг полюса. Приняв за полюс точку В, скорость которой уже известна, получим
_ _ _
VС = VСВ + VВ(1,1,3)
Так как вектор VСВ перпендикулярен ВС, то, выполнив построение плана скоростей, получаем
VСB= μV * PVCB =5*10-3*104=520*10-3 м/с
PVC= 138 мм, тогда VС= μV * PVС =5*10-3*138=169*10-3 м/с
Скорость точки Е определим аналогично скорости точки С:
VЕ =VEВ+VВ
Скорость VЕ направлена по той же линии действия, что и скорость VС.
VЕ = PVЕ* μV =5*10-3*162=810*10-3 м/с
Находим скорость точки D:
VDE= μV * PVDE =5*10-3*160=800*10-3 м/с
VD =VDE+VE,
из плана скоростей PVD=92 мм, значит
VD= PVD* μV =5*10-3*92=460*10-3 м/с
Находим скорости центров масс:
VS1= PS1* μV=5*10-3*98=490*10-3 м/с
VS2= PS2* μV=5*10-3*162=810*10-3 м/с(1,1,5)
VS3= PS3* μV=5*10-3*106=530*10-3 м/с
VS4= PS4* μV=5*10-3*50=250*10-3 м/с
VS5= PS5* μV=5*10-3*68=340*10-3 м/с
Таблица 1.1. Рассчитанные значения скоростей
|
VB, м/с |
VC, м/с |
VD, м/с |
VE, м/с |
VBA,м/с |
VCB,м/с |
VDE м/с |
VS1, м/с |
VS2, м/с |
VS3, м/с |
VS4, м/с |
VS5, м/с |
|
980*10-3 |
169*10-3 |
460*10-3 |
810*10-3 |
980*10-3 |
520*10-3 |
800*10-3 |
490*10-3 |
490*10-3 |
530*10-3 |
250*10-3 |
340*10-3 |
Аналогичным образом определяются скорости точек механизма для других значений угла φ. Результаты вычислений заносим в таблицу 1.1.
При помощи плана скоростей определяем угловую скорость звеньев:



Результаты вычислений заносим в таблицу 1.2
Таблица 1.2 Рассчитанные значения угловых скоростей
|
|
|
|
| 0.038 | 0.0065 | 0.0084 |
Построение планов ускорений
Построение плана ускорений начинаем с определения ускорения точки B. Кривошип AB совершает вращательное движение, поэтому
aB = aBn + aBτ
aBn = AB*ω2(1,1,7)
aBτ = ε1*AB
В нашем случае кривошип вращается равномерно ε1 = 0 и aBτ = 0.
Следовательно, модуль ускорения точки B
aB = aBn = AB*ω2 = 37.682*26 = 36.9 м/с2
Вектор нормального ускорения направлен по радиусу к оси вращения, т.е. от B к A. Выбрав отрезок РаB (в мм), изображающий ускорение точки B, подсчитываем масштабный коэффициент плана ускорений (в м/с2мм)
μа = аB/![]() PaB =
36.9/180*3.14 = 0.065 м/с2/ мм
PaB =
36.9/180*3.14 = 0.065 м/с2/ мм
Отрезок PaB выбираем произвольно, но так, чтобы μа получилось числом, удобным для счета.
Определим ускорение точки С. Звено ВC совершает плоское движение. Поэтому ускорение любой точки этого звена может быть представлено как геометрическая сумма ускорения полюса и ускорения в движении относительно полюса. Приняв за полюс точку B, ускорение которой уже известно, имеем
aC = aB + aCBτ + aCBn
aCBn=VСB2/ВС=0.2704/0.08=3.38м/с2
Построив план ускорений имеем:
aCBτ=8.775 м/с2 и aС =6.5 м/с2
Аналогично находим ускорение точки Е и D:
aЕ = 8.255 м/с2
aD = aE + aDEτ + aDEn
aDEτ=5 м/с2
aDEn= VDE2/DE=906.21*10-3/115*10-3=5.6 м/с2
aD =9.42 м/с2
По приведенным выше формулам, построив план ускорений, производим расчет ускорений точек звеньев механизма в зависимости от значения угла φ. Результаты измерений и вычислений заносим в таблицу 1.3.
Tаблицa 1.3
|
ab, м/с2 |
|
|
ac, м/с2 |
|
|
|
|
ad, м/с2 |
ae, м/с2 |
| 36.9 | 0 | 36.9 | 6.5 | 3.38 | 6.5 | 5.6 | 5 | 9.42 | 8.255 |
При помощи плана скоростей определяем угловое ускорение звеньев. Результаты вычислений заносим в таблицу 3.1
|
|
|
|
| 1.42 | 0.05 | 0.08 |
 ;
;
 ;
;
Таблица 1.4 Рассчитанные значения угловых ускорений
|
aS1, м/с2 |
aS2, м/с2 |
aS3, м/с2 |
aS4, м/с2 |
aS5, м/с2 |
| 5.85 | 8.255 | 7.8 | 4.68 | 3.25 |
1.2 Кинетостатический анализ механизма
Кинетостатический расчет положенный в основу силового расчета механизма базируется на принципе Д’Аламбера, который в общем случае движения звеньев механизмов, совершающих сложное плоское движение, позволяет решить задачу путем сведения сил инерции звеньев к главному вектору инерции Fi и к главному моменту сил Mi.
![]() ,
,
Знак “-” означает, что вектор силы инерции направлен в сторону противоположную ускорению центра масс.
Также существует главный момент инерции звена, который приложен к центру масс звена и направлен в противоположную угловому ускорению звена сторону
![]()
где ![]() — момент инерции звена,
— момент инерции звена,
![]() — угловое ускорение звена.
— угловое ускорение звена.
Расчет сил и главных моментов инерции звеньев механизма
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
 ,
,


![]()
![]()
![]()
![]()
Силы и главные моменты инерции приведены в таблице 1.4.
Таблица 1.4. Рассчитанные значения сил и моментов инерции звеньев механизма
|
|
|
|
|
|
|
|
|
|
|
|||||
| 15 | 66 | 74 | 7.02 | 8.125 | 0.19 | 0.57 |
Определение реакций в кинематических парах
Силовой анализ
механизма начинаем с группы Ассура 3-4. Связи в шарнирах заменяются реакциями ![]() .
.
Реакция в шарнире
Е неизвестна ни по модулю, ни по направлению, поэтому нужно разложить её на
составляющие: по направлению оси ![]() и
перпендикулярно ей
и
перпендикулярно ей ![]() ; в шарнире D реакция
неизвестна по модулю и направлена по вертикали. Обозначим в точке
; в шарнире D реакция
неизвестна по модулю и направлена по вертикали. Обозначим в точке ![]() силу инерции и аналогично силу
инерции в точке D. Обозначим также вес
силу инерции и аналогично силу
инерции в точке D. Обозначим также вес ![]() звена
DЕ и вес ползуна
звена
DЕ и вес ползуна ![]() .
.
Сумма моментов относительно точки D равна нулю:
![]()
![]()
где ![]() ,
,![]() — плечи соответствующих
силы
— плечи соответствующих
силы ![]() и веса
и веса ![]()
Находим ![]() :
:
![]()
![]()
Составляем векторное уравнение:
![]()
С учётом этого
уравнения строим замкнутый силовой многоугольник. На чертеже выбираем полюс ![]() . От него проводим вектор
произвольной длины по направлению силы
. От него проводим вектор
произвольной длины по направлению силы ![]() .Вычисляем
масштабный коэффициент:
.Вычисляем
масштабный коэффициент:
![]()
![]()
Далее к вектору ![]() достраиваем другие
составляющие уравнения (1.3.6), рассчитывая длину векторов при помощи
масштабного коэффициента.
достраиваем другие
составляющие уравнения (1.3.6), рассчитывая длину векторов при помощи
масштабного коэффициента.
В итоге вычисляем ![]() и
и ![]()
Расчет группы Ассура 3-4.
Связи в шарнирах
заменяются реакциями ![]() .
.
Реакция в шарнире
В неизвестна ни по модулю, ни по направлению, поэтому нужно разложить её на
составляющие: по направлению оси ![]() и
перпендикулярно ей
и
перпендикулярно ей ![]() ; в шарнире С
реакция неизвестна по модулю и направлена по вертикали. Обозначим в точке
; в шарнире С
реакция неизвестна по модулю и направлена по вертикали. Обозначим в точке ![]() силу инерции и аналогично силу
инерции в точке С. Обозначим также вес
силу инерции и аналогично силу
инерции в точке С. Обозначим также вес ![]() звена
ВС и вес ползуна
звена
ВС и вес ползуна ![]() .
.
Сумма моментов относительно точки С равна нулю:
![]()
![]()
где ![]() ,
,![]() — плечи соответствующих
силы
— плечи соответствующих
силы ![]() и веса
и веса ![]()
Находим ![]() :
:
![]()
![]()
Составляем векторное уравнение:
![]()
С учётом этого
уравнения строим замкнутый силовой многоугольник. На чертеже выбираем полюс ![]() . От него проводим вектор
произвольной длины по направлению силы
. От него проводим вектор
произвольной длины по направлению силы ![]() .Вычисляем
масштабный коэффициент:
.Вычисляем
масштабный коэффициент:
![]()
![]()
Далее к вектору ![]() достраиваем другие
составляющие уравнения (1.3.6), рассчитывая длину векторов при помощи
масштабного коэффициента. В тоге вычисляем
достраиваем другие
составляющие уравнения (1.3.6), рассчитывая длину векторов при помощи
масштабного коэффициента. В тоге вычисляем ![]() и
и
![]()
Теперь определим уравновешивающую силу и уравновешивающий момент, действующий на кривошип ОА.
На кривошип ОА
действует шатун силой ![]() . Считается, что
сила
. Считается, что
сила ![]() приложена перпендикулярно
звену ОА. В этом случае уравнение моментов всех сил, приженных к кривошипу
относительно точки О, имеет вид:
приложена перпендикулярно
звену ОА. В этом случае уравнение моментов всех сил, приженных к кривошипу
относительно точки О, имеет вид:
![]()
![]()
![]() (1.3.13)
(1.3.13)
![]()
![]() (1.3.14)
(1.3.14)
![]()
Векторное уравнения равновесия ведущего звена:
![]() )
)
Найденные при силовом анализе механизма величины представлены в таблице 1.5.
Таблица 1.5. Силовой анализ механизма
| Силы тяжести звеньев, Н | Силы инерции звеньев, Н | Реакции связи в шарнирах, Н | Моменты инерции, Н·м | ||||
|
G1 |
0,026 |
Fi1 |
15 |
|
10.4 |
|
0.19 |
|
G2 |
0,078 |
Fi2 |
66 |
|
35.4 |
|
0.57 |
|
G3 |
0,093 |
Fi3 |
74 |
R05 |
24.4 |
|
0,005 |
|
G4 |
14,7 |
Fi4 |
7.02 |
R04 |
7.6 | ||
|
G5 |
24,5 |
Fi5 |
8.125 | ||||
|
Fур |
0,197 | ||||||
2 ПРОЕКТНЫЙ РАСЧЕТ МЕХАНИЗМА НА ПРОЧНОСТЬ
В результате динамического анализа плоского рычажного механизма были определены внешние силы, действующие на каждое звено и кинематическую пару. Этими внешними усилиями являются силы инерции Fi, моменты инерции M и реакции в кинематических парах R. Под действием внешних сил звенья плоского механизма испытывают деформации. В данном механизме преобладают совместные деформации изгиба и растяжения.
Анализ нагруженной группы Асура 3 - 4 показывает, что звено 3 во время работы механизма испытывает совместное действие изгиба и растяжения. Для оценки прочности механизма необходимо при помощи метода сечений определить величину внутренних усилий, действующих в сечениях. Значения всех сил сведем в таблицу.
Таблица 2.1
|
|
|
|
|
|
|
| 5.8 | 14.2 | 0.024 | 0.09 | 1.4 | 6.78 |
|
|
|
|
|
|
|
|
|
| 1.3 | 7.3 | 1.36 | 35.6 | 43.5 | 52 | 20.6 | 19.3 |
2.1 Построение эпюр En, Nz, H*M
Нагруженность звена позволяет выделить два участка: BS3 и S3С. Использование метода сечений для нормальной силы NZ дает следующие уравнения:
I участок
![]() (2.1)
(2.1)
![]()
II участок
![]() (2.2)
(2.2)
![]()
По этим данным строим эпюру NZ.
Для поперечной силы QY на соответствующих участках записываются такие уравнения:
I участок
![]() (2.3)
(2.3)
II участок
![]() (2.4)
(2.4)
Согласно с полученными значениями строим эпюру QY.
Аналитические уравнения записываем также для изгибающего момента на участках I и II:
I участок
![]() (2.5)
(2.5)
![]()
II участок
 (2.6)
(2.6)
![]()
Эпюру МХ строим по полученным значениям моментов.
Из эпюр МХ и NZ видно, что опасное сечение звена проходит через точку S3.
Mmax =1.13Нмм
NZmax = 16.4 H
2.2 Подбор сечений
Совмещенные деформации изгибания и растягивания являются причиной возникновения в материале нормального напряжения, которое определяется алгебраической суммой напряжений от изгибания и растяжения:
σmax = σ1 + σ2 = NZmax/F + Mmax/WZ (2.7)
где F – площадь сечения;
WZ – момент инерции сечения относительно оси Z.
Это напряжение σmax , согласно с условиями прочности, должно быть не больше допускаемого │σ│= 160 МПа:
![]() .
.
σmax = NZmax/F + Mmax/WZ ≤ │σ│ (2.8)
Это уравнение дает возможность найти геометрические размеры опасного разреза через подбор параметров F и WZ.
Будем рассчитывать для прямоугольного сечения. Тогда
h = 2b; F = hb=2b2; WZ = 4b3/6; (2.9)
b = u + v, (2.10)
где
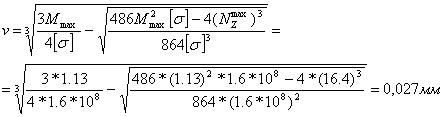
где b=0,054мм; h=2*0,027 =0,054мм.
F = 2b2 = 2*(0,054)2=0,006мм2
WZ = 4b3/6 = 4*(0,054)3/6 = 0,0001мм3
Для круглого сечения используем отношения:
![]() ;
; ![]() ; (2.11)
; (2.11)
В результате подстановок и преобразований получили:
D=u1+v1, (2.12)
где


не надоD=ν1+u1=0,004;
F=πD2/4 = 3.14*(0,004)2/4=0,00001
W=πD3/32=3.14*(0,004)3/32=0,0025*10-8
Для сечения в виде двутавра параметры находим подбором, подставляя в выражение (2.13) значение WX. Принимая [σ] = 160 МПа, выбираем двутавр с параметрами Н = 15 мм, В = 7 мм, S = 1.5мм, S1 = 1.5 мм, ГОСТ 13621-74, изготовленный из конструкционной стали марки (ГОСТ 380-71).
 (2.13)
(2.13)
WZ= 1.13/160*106=0,
007![]()
ВЫВОДЫ
В ходе выполнения курсовой работы были изучены методы анализа и расчёта плоских рычажных механизмов. Динамический анализ механизма показал, что данный плоский рычажный механизм является механизмом второго класса и для его работы необходимо только одно ведущее звено. Также в результате динамического анализа были определены все силы, реакции, моменты, скорости и ускорения, действующие на каждое из звеньев механизма.
Расчёт на
прочность звеньев механизма показал, что наиболее подходящим материалом, из
которого следует изготавливать элементы механизма, является конструкционная
сталь марки (ГОСТ 380-71). Геометрические размеры звеньев механизма для
прямоугольного сечения – 5.4 мм и 5.4 мм, для круглого – диаметр 4 мм, кроме того подобран профиль Ст-45х 430001×НД![]() .
Наиболее подходящей формой сечения, исходя из заданных длин и масс звеньев,
является квадрат.
.
Наиболее подходящей формой сечения, исходя из заданных длин и масс звеньев,
является квадрат.
ПЕРЕЧЕНЬ ССЫЛОК
1 Степин П.А. Сопротивление материалов. Изд. 5-е, перераб. и доп. Учебник для студентов машиностроительных вузов. М., «Высшая школа», 1973.
2 Методические указания к курсовой работе по курсу «Теоретическая механика» для студентов специальностей 7.091807 и 7.091002 / Автор Евстратов Н. Д. – Харьков: ХТУРЭ, 1999. – 40 с.
© 2009 База Рефератов